�Լ������������˻�.pdf
http://www.100md.com
2020��4��10��
 |
| ��1ҳ |
 |
| ��6ҳ |
 |
| ��18ҳ |
 |
| ��26ҳ |
 |
| ��33ҳ |
 |
| ��79ҳ |
�μ�����(14584KB��188ҳ)��
�Լ������������˻��ǹ������˻���װ���鼮����Ҫ�ӻ���������ϵͳ�����п�������GPS���������ң���̨�ȸ����潲�����������˻���ע������ͷ�����

������Ҫ
���˻�������ֱ���������˼�ʻ�����������ܽ�ʲô��ң�ط������Ѿ��ı������ǹ۲����硢������ʳ�����۷��ز�����ս�ķ�ʽ��Ҫȫ����������ǣ�������Ҫ��Ϥ��������ѧ�����ߵ�ң�⡢����ѧ����̡���ͼ�Ķ����������Ƶ�����3D��ģ��
����ͨ��չʾ��С������300���������������������ʾ����Ϊ���ṩ�˺��ջ�����ѧ��ʵ��֪ʶ��ͨ���Ķ�����ѭ�����еIJ��輰���飬�㽫ѧ������ֱ�����Ĺ���ԭ���Լ������������Ĺ�������Ľ��������������ѡ����������ֱ�������ǰ���ֱ���������������ж��ṩ���ʺ��������ı�ѡ�����ͶԱ������
�鼮���߽���
����Belinda��Terry Kilby�����˻������ߡ�������Ӱʦ�������ߡ���ѵʦ��Ҳ��һ�Է��ޡ�����һ�����ͬʱҲ����˱˴˶Լ�����������ר�������顣
��2010�������ǵĹ�˾Elevated Element�Ѿ���ƺ�����������������ʵ�ú�����Ӱ��С�����˷�����(Unmanned Aerial Vehicle��UAV)��
���齫���߷Ķ��꾭һһ����������Ӳ������������Ľ�չ�Լ����˻������ű�����
�½�Ԥ��
��1�� ����
1.1 ����
1.2 Ŀ�����
1.3 ���˻��û�����
1.4 �������м�ʷ
1.4.1 ���ߵ����ģ�ͷɻ�
1.4.2 оƬ�ij���
1.4.3 ���˻�����
1.4.4 GPS�ķ���
1.4.5 ������
1.4.6 �����ֻ�
1.4.7 С���Զ���ʻ���п�����
1.5 ����ԭ��
1.5.1 ����
1.5.2 ����
1.5.3 ��������
1.5.4 ����
1.6 ���л������ò��ݸ˿��Ʒ��������˶�
1.6.1 ����
1.6.2 ƫ��
1.6.3 ����
1.6.4 ����
��2�� ����
2.1 ʲô�ǻ���
2.1.1 ����ʸ��
2.1.2 ���������
2.1.3 ����
2.1.4 ����ƽ��
2.2 ����������������
2.3 ��������
2.3.1 ��1������װѹí��ĸ��
2.3.2 ��2������װ����
2.3.3 ��3������װ�ɾ����
2.3.4 ��4�������������ӿ��
��3�� ����ϵͳ
3.1 ������
3.1.1 ����
3.1.2 �ߴ���ݾ�
3.1.3 ƽ��
3.2 �綯��
3.2.1 �ߴ�
3.2.2 �KVֵ
3.2.3 ������ʵ�������
3.3 ������
3.3.1 �����ٶȿ�����
3.3.2 ����
3.4 ��������
3.4.1 ��1������װ����
3.4.2 ��2�������Ӳ�����ͷ
3.4.3 ��3������װ�ٶȿ�����
3.4.4 ��4�������ӵ�Դ
3.4.5 ��5������װ��ˢ�綯��
3.4.6 ��6����������ˢ�綯��
3.4.7 ��7��������
3.5 ��
��4�� �������
4.1 ʲô�Ƿ��п�����
4.1.1 �Աȿ�Դ���Դ
4.1.2 ������
4.1.3 ��������
4.1.4 ��������
4.2 ��������
4.2.1 ��1������װ���п�����
4.2.2 ��2�������ӷ��п��������
4.2.3 ��3�������������ӿ��
4.3 ��
��5�� GPS�����̺͵�ؼ����
5.1 GPS
5.2 ����
5.3 ��ؼ����
5.4 ��������
5.4.1 ��1������װGPS�豸
5.4.2 ��2��������GPS��������APM
5.4.3 ��3������װ��ؼ����
5.5 ��
��6�� �����
6.1 ʲô�Ƿ����
6.2 ��õ�Ƶ��
6.3 ȫ����صIJ�ͬģʽ
6.4 �Ա�PWM��PPM
6.5 ��������
6.5.1 ��1����ȷ������
6.5.2 ��2������װ���ջ�
6.5.3 ��3������ͨ���ջ�
��7�� ң���̨
7.1 �������������
7.2 ��������
7.2.1 ��1������װ����վ��̨
7.2.2 ��2��������װ��������̨
7.2.3 ��3������ͨ��̨
7.2.4 ��4������װ��������̨
��8�� ����ͷ��FPV�豸
8.1 ���е����˻�����ͷ
8.1.1 M4/3���
8.1.2 Mobius�˶�����ͷ
8.2 ����ֱ������FPV
8.3 ��������
8.3.1 ��1�����̶�����ͷ֧��
8.3.2 ��2�����̶������
8.3.3 ��3������������ͷ�ڿ��֧����
��9�� ArduPilot Mega����
9.1 ��������
9.1.1 ��1�������¹̼�
9.1.2 ��2�������Ӳ���ɱ�Ҫ������
9.1.3 ��3�������ӿ�ѡӲ��
9.2 ̽��Mission Planner�������
9.2.1 ����ģʽ
9.2.2 ������
9.2.3 ��������
9.2.4 ��չ����
9.2.5 ������
9.2.6 ��������
9.2.7 ���мƻ�
9.3 ������
��10�� ��ȫ�������εķ���
10.1 ��ȫ��һ
10.2 ��ѵ�ͽ���
10.3 ��Դ
10.4 ��Ҫ����
10.5 �ؼ����а�ȫ����
10.6 ��һ�˳��ӽ�
10.7 ���еij��Ϻ�ʱ��
10.8 ����ǰ����б��ͷ�����־��Ϣ
10.9 ���������
10.10 ���к�ά����־
10.11 ����ͼ��
��11�� ��ʵ�����е�Ӧ��
11.1 ��������˻�
11.2 ������Ӱ
11.3 ��ͼ���������
11.4 ��ũҵ
11.5 �������Ԯ
11.6 ������ʩ���
11.7 ��������
��12�� ��չ���˻�������
12.1 ����һ������ͷ�͵�һ�˳��ӽ�
12.2 �������������ɼ���������
12.3 �ı��ٶȣ�����λ��Ԥ�������
12.4 �ӳ�����ʱ��
12.5 ��л
�Լ������������˻���ͼ
Ŀ¼
������
ǰ��
��1�� ����
1.1 ����
1.2 Ŀ�����
1.3 ���˻��û�����
1.4 �������м�ʷ
1.4.1 ���ߵ����ģ�ͷɻ�
1.4.2 оƬ�ij���
1.4.3 ���˻�����
1.4.4 GPS�ķ���
1.4.5 ������
1.4.6 �����ֻ�
1.4.7 С���Զ���ʻ���п�����
1.5 ����ԭ��
1.5.1 ����
1.5.2 ����1.5.3 ��������
1.5.4 ����
1.6 ���л������ò��ݸ˿��Ʒ��������˶�
1.6.1 ����
1.6.2 ƫ��
1.6.3 ����
1.6.4 ����
��2�� ����
2.1 ʲô�ǻ���
2.1.1 ����ʸ��
2.1.2 ���������
2.1.3 ����
2.1.4 ����ƽ��
2.2 ����������������
2.3 ��������
2.3.1 ��1������װѹí��ĸ��
2.3.2 ��2������װ����
2.3.3 ��3������װ�ɾ����
2.3.4 ��4�������������ӿ�ܵ�3�� ����ϵͳ
3.1 ������
3.1.1 ����
3.1.2 �ߴ���ݾ�
3.1.3 ƽ��
3.2 �綯��
3.2.1 �ߴ�
3.2.2 �KVֵ
3.2.3 ������ʵ�������
3.3 ������
3.3.1 �����ٶȿ�����
3.3.2 ����
3.4 ��������
3.4.1 ��1������װ����
3.4.2 ��2�������Ӳ�����ͷ
3.4.3 ��3������װ�ٶȿ�����
3.4.4 ��4�������ӵ�Դ
3.4.5 ��5������װ��ˢ�綯��
3.4.6 ��6����������ˢ�綯��3.4.7 ��7��������
3.5 ��
��4�� �������
4.1 ʲô�Ƿ��п�����
4.1.1 �Աȿ�Դ���Դ
4.1.2 ������
4.1.3 ��������
4.1.4 ��������
4.2 ��������
4.2.1 ��1������װ���п�����
4.2.2 ��2�������ӷ��п��������
4.2.3 ��3�������������ӿ��
4.3 ��
��5�� GPS�����̺͵�ؼ����
5.1 GPS
5.2 ����
5.3 ��ؼ����
5.4 ��������
5.4.1 ��1������װGPS�豸5.4.2 ��2��������GPS��������APM
5.4.3 ��3������װ��ؼ����
5.5 ��
��6�� �����
6.1 ʲô�Ƿ����
6.2 ��õ�Ƶ��
6.3 ȫ����صIJ�ͬģʽ
6.4 �Ա�PWM��PPM
6.5 ��������
6.5.1 ��1����ȷ������
6.5.2 ��2������װ���ջ�
6.5.3 ��3������ͨ���ջ�
��7�� ң���̨
7.1 �������������
7.2 ��������
7.2.1 ��1������װ����վ��̨
7.2.2 ��2��������װ��������̨
7.2.3 ��3������ͨ��̨
7.2.4 ��4������װ��������̨��8�� ����ͷ��FPV�豸
8.1 ���е����˻�����ͷ
8.1.1 M43���
8.1.2 Mobius�˶�����ͷ
8.2 ����ֱ������FPV
8.3 ��������
8.3.1 ��1�����̶�����ͷ֧��
8.3.2 ��2�����̶������
8.3.3 ��3������������ͷ�ڿ��֧����
��9�� ArduPilot Mega����
9.1 ��������
9.1.1 ��1�������¹̼�
9.1.2 ��2�������Ӳ���ɱ�Ҫ������
9.1.3 ��3�������ӿ�ѡӲ��
9.2 ̽��Mission Planner�������
9.2.1 ����ģʽ
9.2.2 ������
9.2.3 ��������
9.2.4 ��չ����9.2.5 ������
9.2.6 ��������
9.2.7 ���мƻ�
9.3 ������
��10�� ��ȫ�������εķ���
10.1 ��ȫ��һ
10.2 ��ѵ�ͽ���
10.3 ��Դ
10.4 ��Ҫ����
10.5 �ؼ����а�ȫ����
10.6 ��һ�˳��ӽ�
10.7 ���еij��Ϻ�ʱ��
10.8 ����ǰ����б��ͷ�����־��Ϣ
10.9 ���������
10.10 ���к�ά����־
10.11 ����ͼ��
��11�� ��ʵ�����е�Ӧ��
11.1 ��������˻�
11.2 ������Ӱ11.3 ��ͼ���������
11.4 ��ũҵ
11.5 �������Ԯ
11.6 ������ʩ���
11.7 ��������
��12�� ��չ���˻�������
12.1 ����һ������ͷ�͵�һ�˳��ӽ�
12.2 �������������ɼ���������
12.3 �ı��ٶȣ�����λ��Ԥ�������
12.4 �ӳ�����ʱ��
12.5 �������
���˻������ǽ��������ٷ�չ��һ�������������ھ��û���������������
�˻�����ɱ����������ܶ��������ܻ�ӭ���ڽ�����һ��ʱ���ڣ������ۡ������
Ӧ�ö���������չ��
���ź��յ����豸���������ʹ���ļ������Ӳ���IJ��Ϸ�չ�����˻��Ѿ���
���˹�ȥң�ط������ķ��飬�������������˶�Ŀһ�µļ�������Ϊ�����ĺ��ջ�
���ˡ��ִ��������˻������ܹ��ڵ��������ִ�������������൱ǿ�������
�������������������������Ե���Ļ��������ܵ��������
���˻��Ĺ㷺Ӧ��Ҳ�����˷�չԽ��Խ׳��İ�������������ģ�����ߡ�����
����������Ӱ�����߲��ϵؼ������С��������˻������ű���Ҳ�������ⷽ
����鼮��������ʤ�������Ǹ����ŵİ����������һ��ϵͳ�ؽ������˻���
����ԭ�������������Լ���ȫ����Ľ̡̳�������Kilby�����DZ�д������Terry
KilbyΪ�������רҵ���������˻��������֣�Belinda KilbyΪ�߱��Ӿ�������
���Ľ�ʦ����������˻��Ļ����������ԭ�����֣�ͨ����һ��С�����˻�����
���̵���ϸ���ܣ��Ӷ�ʹ���߶���һ������������ȫ����˽⡣���������
�����˻���ʵ���е�Ӧ�á����а�ȫ��֪��ʵ��֪ʶ�����ṩ������������Դ��ʹ
���߿��Լ�����չ�Լ���֪ʶ�漰�����������飬��Ϊ���������˻��мҡ����鲻
���ʺϳ�ѧ������ѧϰ�����ʺ���һ������������߲ο���
����ķ��빤����Ҫ��Ҧ����ɣ���ܲ������������ҫ�ɵ���ҲΪ�����
���������˹��ס�ͬʱ���ڴ˸�л���¹�˾�ı༭�ѽ��ڷ�������и���İ�����
ָ����
����
ǰ��
������Belinda��Terry Kilby�����������˻������ߡ�������Ӱʦ�������ߡ���ѵʦ��Ҳ��һ�Է��ޡ�����һ�����ͬʱҲ����˱˴˶Լ�����������ר
�������顣��2010�������ǵĹ�˾Elevated Element�Ѿ���ƺ�������������
����ʵ�ú�����Ӱ��С�����˷�����(Unmanned Aerial Vehicle��UAV)����Ϊ
�ⷽ��ij����ߣ����dz�Ϊ���ڵ���ý��ķ���ʽUAV���������ˡ����Ǹ���Ӳ������������Ľ�չ�Լ����˻������ű�������ˣ����ǿ����������ʹ��·��������
�˻��������ߺ��û���
ͬ���鼮�е�������
2013���^�����Ƿ����ˡ����˻��������Ͷ���Ħ�������ǵ�һ����ȫʹ��С
�Ͷ���UAV�������Ƭ��������ĵ�������������������������Լ��豸��������
���ݱ�ġ���Ƭ����ʱ��˳�����У�չ����������������������������к�ʹ��
��Щ���˻�������Ƭ�Ĺ����У���Ƭ�����IJ�����ߡ�ͨ���Ͷ���Ħ�ٽ���������
���ң����ǽ����鷢���ᰲ���ڰͶ���Ħ����ó�����ĵġ�����֮�ۡ��۾�̨�Ͼ�
�С�����һ�������ĵص㣬��Ϊ��27��¥�������ӽǺ����ǹ���������ʮ������
�������
�����Ŀ��
�����Ŀ�����ԡ�С������(Little Dipper)300����������ֱ������������
��Ϊ�������ܿ��л����˵�ʵ��֪ʶ�������Ķ����鲢��ѭ���еIJ���ͽ��飬��
����ѧ������ֱ�����Ĺ���ԭ�����Լ�����������һЩ�������Ľ������������
���ĵط������ǻ�������ɹ����Ե����ѡ������ʺ϶�������ƫ�õ�ͬ����
����������ѡ������������ỹ�ǰ���ֱ������ʹ�õĶ�����ͬ�ĸ��
��С��������һ�ֿ�Դ��ƣ�����ļ����Դ�
http:gettingstartedwithdrones.comlittledipper-build���أ�Ҳ����
��http:www.MakerShed.com���������ġ�С����������
��Ҫ����ʧ�ܣ�ÿ���˶��᷸����Ψһ��Ҫ���ǣ����Dz��ϳ��ԡ�����������
���ջ�������һ���������飬�����ͨ���������Խ����ʵ�е����⣬���յõ���
֮���ľ��顣
�����ֲ������ٶ�����С�IJ��Ҳ�ܹ������ɰܡ�����ʹ�÷���
�����ÿ���½ڽ��������˼�ʻ�ɻ�������һ���ض����֡����е�һ�¿��ܽ�
�������Ļ���������һ�¿����������ʹ��ȫ��λϵͳ(Global
Positioning System��GPS)�������еķ���������Ŭ�����ܾ����ܶ�����⣬��
��Ҫ�μǣ�������һ�������鼮�������ǰ��������UAV�ٿ�ȫ�顣������Ǹü���
�����֣��������д�����Ҫ�����ݹ�����ϸ��Ħ����ʹ������˻��Ѿ�����Ϥ����
��Ҳ���Կ϶�������Ȼ�ܹ��ҵ�һЩ����ֵ����Ϣ���뵽�Լ���֪ʶ���С�
�����1��֮����Ӧ�ûᷢ��һ����Ҫ��ģʽ�����½ڶ��Ƚ��ܱ�������
��֪ʶ��Ȼ�������ʾ�����зֲ����⡣���������Dz��DZ����н��ܵ�ͬһ�ַɻ�
������Ҫ��ÿ���½ڵ����۲��ֶ������ھ��ֵ����˻�������С�͵�250����
��ֱ���������͵�1000������ֱ����������㲻��Ч�����ǵ��ͺţ�������������
��ָ�ϣ������Լ�����Ҫѧϰ���е����ۡ�
�������Ǿ���ḻ�����˻���ʻԱ����ҵ�మ���ߣ�������Ϊÿ���˶��ܴ�ÿ
һ�½ڵ����۲����л��档���ǽ������Ķ���Щ����֪ʶ�������Ҳ����ʾ������
�����������Ա��Ķ���������������ѧϰ�����ٿ�ʼ�����������漼����ȫ������
���ڿ�ʼ�����ɻ�֮��Ϊ���ṩ������
����ʹ��Լ��
����ʹ�������Ű�Լ����
>��ʾһ��ע�⡢��ʾ���߽��顣
��ʾ���档
Safari����ͼ��
Safari����ͼ��(http:www.safaribooksonline.com)��һ���㲥ʽ��
����ͼ��ݣ��ṩ���Լ�������ҵ���������һ�������ǵ��鼮����Ƶרҵ���ݡ�
����ר�ҡ�����������Ա��Web�����Ա�ʹ�ҵ�߶���Safari����ͼ�鵱����
����������⡢ѧϰ����֤��ѵ����Ҫ��Դ��Safari����ͼ��Ϊ��ҵ�������������������������ṩһϵ�в�Ʒ��ϺͶ�
�ۼƻ���
�����߿��Դ�����Maker Media��O�Reilly Media��Prentice Hall
Professional��Addison-Wesley Professional��Microsoft Press��Sams��Que��Peachpit Press��Focal Press��Cisco Press��John WileySons��Syngress��Morgan Kaufmann��IBM Redbooks��Packt��Adobe Press��FT
Press��Apress��Manning��New Riders��McGraw-Hill��JonesBartlett��Course Technology�����ټҳ����̵Ŀ��������ݿ������ǧ���鼮����ѵ��Ƶ��
����ǰ�ָ塣����Safari����ͼ�����Ϣ�����Է������ǵ���վ��
��ϵ��ʽ
�뽫�Ա������������ⷢ�������̣�
Make��
1160 Battery Street East��Suite 125
San Francisco��CA 94111
877-306-6253(���������ô�)
707-639-1355(���ʻ��ߵ���)
����Ϊ���齨����һ����ҳ���������г�����ʾ�������и�����Ϣ�������
��http:bit.lygs_w_drones���ʡ�
���ۻ���ѯ�ʹ��ڱ���ļ������⣬�뷢�͵����ʼ���
bookquestions@oreilly.com��
��1�� ����
1.1 �����������������������ͻ���������Ƶ���ؿ������˻�(drone)����ʡ�����
�������˻�����������һ�������������ַ�����������С��ң����߷ɻ���������
�еĻ����ˣ���ȫ����װ�ľ���������˻�������Ҫ����Ϊ��ͬ����Ϣ��Դ������
���в�ͬ�Ķ��壬��ô���Ϊ���˻��Ķ��廮����Χ������˵����ʲô���������
���أ������Ǵ�һ���������忪ʼ��
Τ�ϴʵ�����˻��Ķ����ǣ���ң��װ�û����ؼ�������������˼�ʻ����
�����ߴ�ֻ��
�������dz����������µ�ý�屨���ض����͵����˼�ʻ������ʱ�����ǻῴ
����ƫ��ȫ������ʹ������Ϣ��������������һ��������Ķ��塣Terry˵
��������GPS���Զ���ʻ�ǵ�������Ϊ���ߵ����(Radio-Controlled��RC)����
�������˻��Ľ��ޡ���ij�ַ��������Զ���ʻ����������ʹ�����������Ľ����DZ�
���ȶ�����Terry���������������˻��������У����ǽ�ʹ�����µ�Լ����
���˻�
��GPS�������Ƶ����˼�ʻ��������
ң�ط�����(Remotely Piloted Aircraft��RPA)
�ɼ�ʻԱ�ڵ��������ߵ緢���������������豸���Ƶ��ͺš�
UAV
�����ɼ�ʻԱ������������GPS�������Ƶķ�������
С�����˼�ʻ����ϵͳ(sUAS)
�漰���˼�ʻ���ռ�����������ع��̡�
������ϲ����ϲ�������˻�������Խ�����ʹ�á����ǽ�������ʣ�����ͨ��
˵��С��UAV����������Ӧ�ã������ı��为�����塣�м��ڴˣ����DZ����ǿ�Լ�
�����⣬����ý��ġ����˻�������������չ�������ͼ�ƶ�ȫ���С��UAV
��ҵʹ�����ߵ�ͬʱ�����Ƕ����뾡�������κͰ�ȫ������еĿ��֡�1.2 Ŀ�����
������һ������������������ֱ������ָ��(�Լ���֮�������������)����
������ѧ�͵���ѧ����������ǿ�չ���л������о����������ڣ���Ϥ�����Ĺ���
���豸(�������)���ڳɹ�������Լ���С��UAVҲ���а�����
�����������ij�ֶ���ʱϲ�����Ͳ��εط������Խ�����⣬��ô�ͻ�ϲ����
���л����ˡ�����һ���ܹ����еĻ����ˣ���ȫ�µ��ӽ����ͷ羰����ֵ�û���ʱ
��;�������ҵ��
1.3 ���˻��û�����
������������ʱ��֪������������������dzɹ�֮������ͬ���Կ��л�����ѧ
����Ȥ���˽�����ϵ���Dz������Ⲣ�ҳ���������ı�����Դ��������̳���˽���
������ν����������ļ���;����Terry��ϲ����һ����վ��
http:www.multirotorforums.com������̳�ϵ����ǿ����ط���С��UAV����
�ͷ��еľ��鼰���⡣
�������ڵĵ���������Ҳ��UAV��������֯���ߺ�ģ���ֲ������Ƕ�����������
�ۻ��п���������ס����Գ�����Meetup.com(http:www.meetup.com)����
�����˻�(�������������)�û��顣��һ��ֵ��һ���ĵط�����������ģ��ѧ��
(Academy of Model Aeronautics��AMA)��AMA(http:www.modelaircraft.org)��ȫ�����ĺ���ģ��ѧ�ᣬ������
1936�ꡣ�����ڰͶ���Ħ�ͻ�ʢ�ٵ�����һ���ܳ�ɫ�����壬Ϊ��������UAV����
���������˺ܴ�Ĺ��ס�������ϵظ�л�������Ǽ�����һ�����ÿ���ˡ�
>���ڰ�ȫ�����εķ��л��AMA��һ���ܺõġ����ʵ��ָ�ϡ�PDF��
��(http:www.modelaircraft.orgfilesreport_on_revised-550-560-oct-8-
2012.pdf)��
1.4 �������м�ʷ
������Ϊ�����˻�������������ķ����������ߵ����ģ�ͷɻ���оƬ��GPS���������������ֻ��������������˽�һ�¡�
1.4.1 ���ߵ����ģ�ͷɻ�
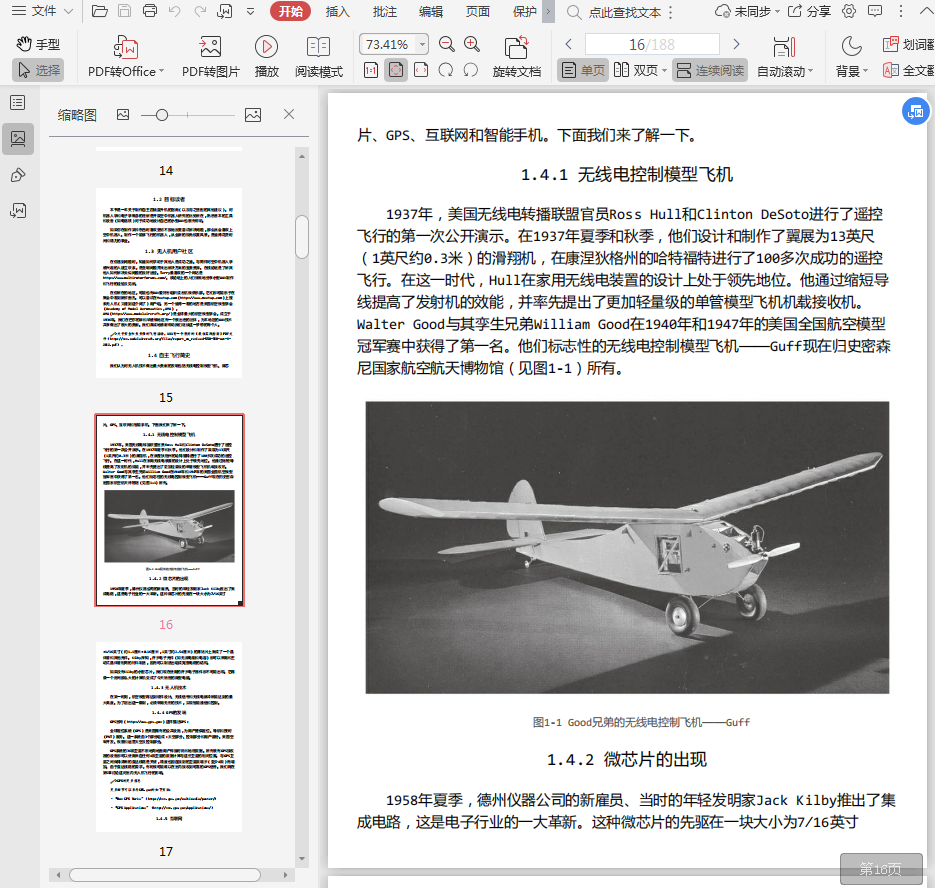
1937�꣬�������ߵ�ת�����˹�ԱRoss Hull��Clinton DeSoto������ң��
���еĵ�һ�ι�����ʾ����1937���ļ����^��������ƺ���������չΪ13Ӣ��
(1Ӣ��Լ0.3��)�Ļ�������ڿ����Ҹ��ݵĹ��ظ��ؽ�����100��γɹ���ң��
���С�����һʱ����Hull�ڼ������ߵ�װ�õ�����ϴ������ȵ�λ����ͨ�����̵�
������˷������Ч�ܣ�����������˸����������ĵ���ģ�ͷɻ����ؽ��ջ���
Walter Good���������ֵ�William Good��1940���1947�������ȫ������ģ��
�ھ����л���˵�һ�������DZ�־�Ե����ߵ����ģ�ͷɻ�����Guff���ڹ�ʷ��ɭ
����Һ��պ��첩���(��ͼ1-1)���С�
ͼ1-1 Good�ֵܵ����ߵ���Ʒɻ�����Guff
1.4.2 оƬ�ij���
1958���ļ�������������˾���¹�Ա����ʱ�����ᷢ����Jack Kilby�Ƴ��˼�
�ɵ�·�����ǵ�����ҵ��һ����¡�����оƬ��������һ���СΪ716Ӣ���116Ӣ��(Լ1.1���ס�0.16���ף�1Ӣ��Լ2.54����)�ı���Ƭ�ϼ�����һ����
��ܺ�����Ԫ����Kilby��֪���������Ԫ��(����Դ����͵���)�����Բ��ú���
��ʽ�������ͬ�IJ������죬���������������������·�Ľṹ��
���û��Kilby��С��оƬ����������ʹ�õ�������������������ܳ��֡�����
��һ��������ô��ļ��������˽������۵��͵��ԡ�
1.4.3 ���˻�����
��ijһʱ�̣�����ģ�ͽ��ﵽӲ����ơ������źź����ߵ��������ܴﵽ����
��߶ȡ�Ϊ�˳�����һ���ƣ�����������εļ�����ʵ������ͨ�źͿ��ơ�
1.4.4 GPS�ķ���
GPS����(http:www.gps.gov)��������GPS��
ȫ��λϵͳ(GPS)������ӵ�еĹ�����ʩ��Ϊ�û��ṩ��λ����������ʱ
(PNT)������һϵͳ��3��������ɣ�̫�ղ��֡����Ʋ��ֺ��û����֡�������
���������ָ�����Ӫ̫�ռ����Ʋ��֡�
GPSϵͳ��36�����Dz��ϵ�������û�����ʱ��͵������ݡ�����װ��GPS����
�����豸������ʹ�������κ�4�����ǵ����ݼ�������Щ���ǵ����λ�á���GPS��
��֮�䱣��������ֱ����·�ǹؼ�������Ҳ�����ӵ�������������(����4��)����
�ӡ�����ֱ����·��Ҫ����ʱ��������������ڽ��յ��ɿ���GPS�źš����ǽ���
��5����������������˻����е�Ӱ�졣
>GPS�ĸ�����Ϣ
����ϸ�ڿ��Բο�GPS.gov������ҳ�棺
����How GPS Works��(http:www.gps.govmultimediaposter)
����GPS Applications��(http:www.gps.govapplications)
1.4.5 ���������û�л����������˺��������˻��Ͳ��������ڵķ�չ�������̵ꡢ��ữ
ý�����̳ʹ���ǿ�������������ͬȫ�����κεط�������һ��ѧϰ��Terry�ڵ�һ
����������ֱ����ʱ�۲������˵���Ʋ����������ʡ�UAVԽ���ܣ���������δ��
�����˻�Ӧ���о�Խ��Ҫ��
1.4.6 �����ֻ�
���ż�����������ʹ������ߴ�Ĵ������С����ģ�ͷɻ���ʹ�������ֻ�Ҳ
ֻ��ʱ������⡣������ת�����ֻ�ʱ������ķ�����֮�ı䣻ͬ���Ĵ�����Ҳ
�������ڿ���С�����˻�����Ϊ�ƶ���������ʦ��Terry��Ϥ�ƶ�Ӧ�ú������ֻ���
��ϵͳ���ܵĿ�����Ŀǰ�������������˻���ͼ��������һЩӦ�ó���
1.4.7 С���Զ���ʻ���п�����
GPS���������������ֻ���������һ����������˻��Ĵ��ԡ������п�������
�����Զ���ʻ����2000��ǰ��ʼ�����ڰ����������Ķ���ֱ�����ϡ����ھ���
GPS���ܵķ��п�������Ԫ���ɵ¹���MikroKopter��˾����ģ���������й���˾
��������һװ�á���Լͬһʱ�ڣ�MultiWii(http:www.multiwii.com)��Ardupilot(http:ardupilot.com)��Open
Pilot(https:www.openpilot.org)�ȿ�Դ��Ŀ������MultiWii����������
������һ����Ȥ����ʵ����һ��װ����ʹ��������Wii�������ϵĴ����������ġ���
���ܲµõ���Ardupilot�����������Ϊ���������Arduino��
���죬С���Զ���ʻ���Ѿ����˺ܴ�ķ�չ�������ͺ��������������С��Զ�
�������Զ�������Ƚ����ܡ����������ڼ���ǰ��ֻ���ڶ���ģ�����ҵ�����
�˿��Կ����������ķ�չ�ж�ô�졣
���п��������С���Զ���ʻ�Ǵ�����
���д�������Ȼ����ȫ�µĸ���������ն�����㹻С�ɺ���㣬������UAV
�Զ���ʻ����ʹ�ã�
����������ʽ����
������
������ת�ٶ�
���ټ�
��������
ѹ��������
ͨ����������ѹ�����㺣�Ρ������������������������������һ�����Բ���
��Ԫ(Inertial Measurement Unit��IMU)
1.5 ����ԭ��
���ն���ѧ��һЩ�Ĺ�����ӵ��������ɡ�Ϊ�˺ܺõ��������ǣ���һЩʱ����ϰţ�ٶ�����û�л����ġ�������̸����������ʱ��ָ���Ǽ�
�����������������������һ�������ϵ�����ƽ��ġ���һ�������������������
�����ͬ������������ʹ��ھ�ֹ���������ƽ�⣬��������Ÿ�ǿ�����ķ����
�١�
1.5.1 ����
�����������������ϵ����á���һ��ѧԭ����ʱҲ�����������������������
���������������������ƽ����߿˷�����(���Ǻܿ콫�������������һ��)��
����������ġ�����ʹֻ����ʱʧȥ�������������������ʹ�������ء�������
ʼ���ն�Ҫ����һ������������ע��������ܷ��������طֲ������������ϣ���
�Ƿ������е�ijһ�㡪����Ϊ���ġ����������������Ӱ�����
1.5.2 ����
�����������Ķ����棬�DZ��ַ�����λ�ڿ��е�������(��ͼ1-2)����װ�л�
���ķ������ϣ��������������ͻ��������Ŀ��������������Ϸ��������ٶȽϿ죬�������ѹ����С�������·������ٶȽ�������˿���ѹ���ϴ����ڻ����Ϸ���
��ѹ��С���ɻ�����ֱ�����������롱���С���������ˮƽ����ʱ�������������
���������Ҫ�����������������������
ͼ1-2 �����ڿ�����ǰ�ƶ�ʱ��������
1.5.3 ��������
���Ƿ�����������ʱ�������������(��ʻ��)���⣿�������ܵ���������
�����ǿ����������ڴ��������κ��ٶ��ƶ������嶼������һ���Ŀ�������������
��������������˶��ٶ�����������������Ƿɻ������������й⻬����
��ԭ������������ʹ������Χ�Ŀ�����˳����������������������߳�����Ч
�ܡ���������Ҳ������ʽ�ɻ������֮��������������ܵ�ԭ��������ֱ����
(���˻�)��˵������һ��ǿ���������
1.5.4 ����
�����е�������ʹ�������ڿ����ƶ��Ļ�е�������������˶��Ƿ�����������
�������������(������е�ʱ��)��ʹ���κ��ƽ�ϵͳ��ɵġ��������������
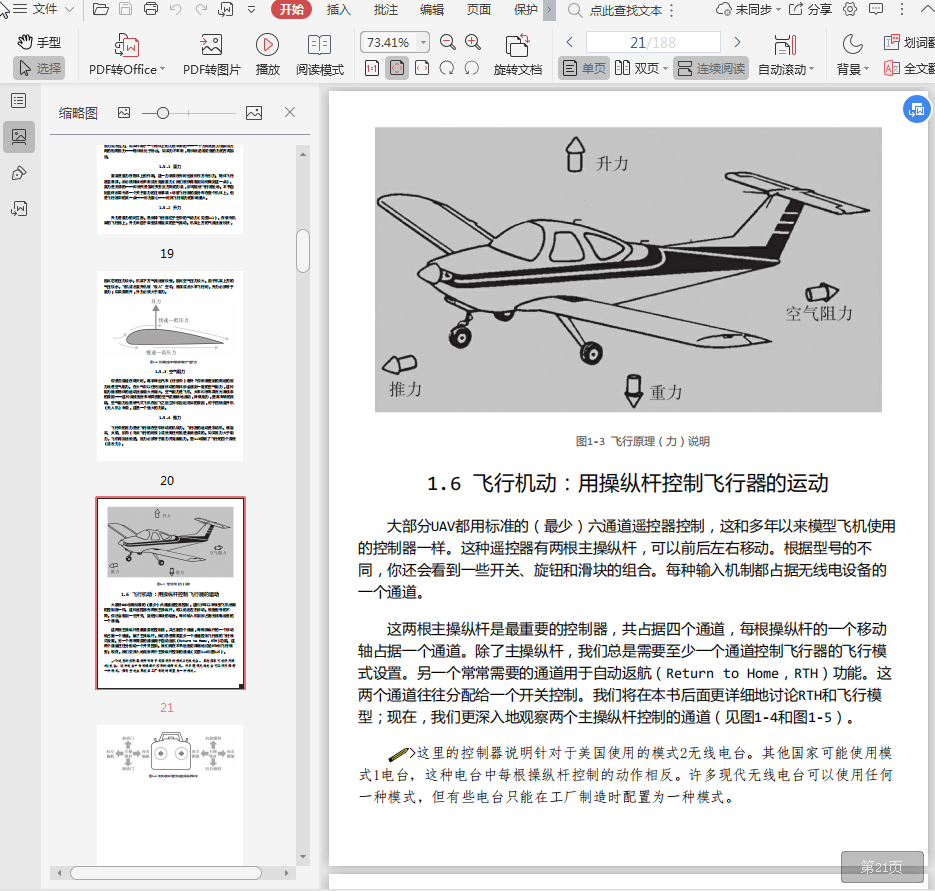
�����ɻ�������ǰ����������������������˷�������ͼ1-3˵���˷��е��ĸ�ԭ��
(������)��ͼ1-3 ����ԭ��(��)˵��
1.6 ���л������ò��ݸ˿��Ʒ��������˶�
��UAV���ñ���(����)��ͨ��ң�������ƣ���Ͷ�������ģ�ͷɻ�ʹ��
�Ŀ�����һ��������ң���������������ݸˣ�����ǰ�������ƶ��������ͺŵIJ�
ͬ���㻹�ῴ��һЩ���ء���ť�ͻ������ϡ�ÿ��������ƶ�ռ�����ߵ��豸��
һ��ͨ����
�����������ݸ�������Ҫ�Ŀ���������ռ���ĸ�ͨ����ÿ�����ݸ˵�һ���ƶ�
��ռ��һ��ͨ�������������ݸˣ�����������Ҫ����һ��ͨ�����Ʒ������ķ���ģ
ʽ���á���һ��������Ҫ��ͨ�������Զ�����(Return to Home��RTH)���ܡ���
����ͨ�����������һ�����ؿ��ơ����ǽ��ڱ���������ϸ������RTH�ͷ���ģ
�ͣ����ڣ����Ǹ�����ع۲����������ݸ˿��Ƶ�ͨ��(��ͼ1-4��ͼ1-5)��
>����Ŀ�����˵�����������ʹ�õ�ģʽ2���ߵ�̨���������ҿ���ʹ��ģ
ʽ1��̨�����ֵ�̨��ÿ�����ݸ˿��ƵĶ����෴�������ִ����ߵ�̨����ʹ���κ�
һ��ģʽ������Щ��ֻ̨���ڹ�������ʱ����Ϊһ��ģʽ��ͼ1-4 ģʽ2��RC��������Ҳ��ݸ�����ͼ1-5 ���ݸ���������ƶ�������
1.6.1 ���������ݸ˵�ǰ���ƶ����Ʒ����������š�����˼�壬���ű����Ͼ��Ƿ�����
�ļ���̤�塣�ڴ�����£�����ֵԽ�ߣ��綯����ת��Խ�졣��Ȼ��Ҳ������
����������ǽ��ں����½������ۡ�Ϊ���÷������ڵ����Ͽ����������ű������
�㹻���������Ե������������á�����ǰ����ʱ�����ű���˷�����������������
1.6.2 ƫ��
�����ݸ˵������ƶ�������ƫ����ͨ������Ҳ����������档ƫ������ֱ��
�����߶����������ˮƽ�����ת�������ŷɵ���һ�̶ܹ����ɻ�����ô���ͨ
��������������棬��Ϊ�����������Ŀ���ʹ�õ���ͬһ�����ơ�����ǰ����ʱ��ƫ���ͷ����Է�������Ӱ������ͬ�ģ�ʹ������ת������ķ���
����ֱ�������˶�����ֻ�������������������ģ��ɻ���Ҫ�����ͷ�����
����ɵķ��ж����أ�����ȫ����һ������ʸ�������Ĺ��̡���һ�½�����ؽ���
��һ���̣������˼·���ǵ����ؿ���ÿ�����������ٶȣ�ʵ���κη�����ƶ���
���磬�������������˳ʱ�뷽����������ٶȡ�������ʱ�뷽����������ٶȣ�ʵ��˳ʱ��ƫ����
1.6.3 ����
�Ҳ���ݸ˵�ǰ���ƶ������ڸ�����ͨ������Ҳ��������������һ�������Ϻ�
������б��ͷ�����Ҳ���ݸ�ǰ��ʱ����ͷ��������б����֮��Ȼ���ڹ̶����ɻ�
�ϣ���ͨ����ˮƽ������ͬһ������бʵ�֡�����ֱ��������ͬƫ��ʱһ��������
ʸ������ʵ����ͬ�Ķ��������Զ���ʻ�Ǿ����Զ�ˮƽģʽ�������˷�������
�����Ƕȡ�����ģʽ���ܲ������������ƣ��������������ȵظ��������ʵ�����
���£���������һֱ��б����ǰ�����������ڳ������ֶ���֮ǰ�����һЩ��ϰ!
1.6.4 ����
�Ҳ���ݸ˵������ƶ������ڷ�����ͨ����Ҳ��Ϊ��������������ʹ��������
���������������Ҳ���б�����ڹ̶����ɻ���ͨ�����෴������б����ˮƽ����
(��Ϊ����)ʵ�ַ������ڶ���������ϣ����з�������Ҳͨ��ʸ������ʵ�֡���
����̬�ı仯���·���������б�ķ�����С�����һ�������Զ�ˮƽģʽ�����ķ����ǶȻ��ܵ����ƣ����ֶ�ģʽ���������ơ�����ȷ���Զ���ʻ�������£�����������ϰ��С�ͷ������Ϳ�����̶����ɻ�һ�����Ͱ��������
�������ɣ�ʹ�÷���ģ����
���뾡���ڵ�����ʹ�÷���ģ������(http:getting-
startedwithdrones.comsimulators)��ϰ���ݸ˿��ơ����ǽ�����ͨ���о�����
���Լ�����˳�ֵ��������������Լ������������������ѵ��Ӫ��ʹ��Phoenix
Professional Flight Simulator������������̴���һ��������ң������������
USB�������ӵ���������㻹�������ض����ƶ�Ӧ�ã�����������ѵ�Ӧ����������
��Ŀǰʹ�õ���һ��ģ������Heli-X�����Ǻ�ϲ�������������Ϊ��������Mac�Ϲ�
����
����������˵��ģ�����Ǻ��м�ֵ�Ĺ��ߣ������ڲ�����װ��������µ�
����������ġ����о���IJ�����Ҳ��������ĥ���Լ��ļ��ɡ����������������
������ϰ������һ���ܰ������顣���ڣ�Terry����������һ�������죬��ģ������
��ѧϰ���м��ɡ�������ڷ������������ѣ��Բ��ݸ˿��Ƶ�ǿ������佫�ı�
һ�С�
��2�� ����
2.1 ʲô�ǻ���
�����Ƿ����������塣���������������������ء�������ȡ�������װ�ڻ�
���ϡ������Ĵ�С���Ӷȶ��ֶ����������ǸոնԷ��в�����Ȥʱ��������һЩ
�������dz������ͼ���ڲͽ�ֽ�ı����ϻ��ɵģ����߾���ֽ���ϲ��ж��ɡ�
���죬����ʹ�ü�����������(CAD)������ƿ�ͼ��Ȼ���ü��������(CNC)
�����ӹ������ǽ��ڱ��½����������е�������ͣ��������ȼ��о�һ�£���
������η������ġ�
2.1.1 ����ʸ�������еĻ������㶼�ܿ���һ����ͬ�����ʡ������Ƕ����˳ʱ�����ʱ���
�����������Ƕ������������������ƶ��Ļ�����ÿ���綯������ת������ֱ��
���ڵĵ綯���෴��ʹÿ���綯��������Եĵ綯������ƽ�⡣��ˣ���������UAV
������������Ŀ��Ϊż��(��һ�����ǽ�����һ������)�����磬������ֱ����
�ϣ������Ͷ��Ϸ���ĵ綯��˳ʱ��ת�������������Ϸ���ĵ綯������ʱ��ת��
(����ָ����ķ���)����������������֮������Ҫ������ֱ�������κη�����
��(����ƫ��)����Ҫ���ľ��Ǹı�綯��ij����ϵ��ٶȡ����磬Ҫ˳ʱ��ƫ
�������Ǿ����������Ͷ��Ϸ���綯����ת�١�һ���綯�����ơ�����һ���綯
�����������Ϳ���ʹ��������������Ҫ�ķ���ת�䡣
Ϊʲô���෴�ķ���
������Ѿ�ע������ǵ��������������ڵ���������ת�����෴����������
���ɺܳ�֡���һ����Ϊ�������ṩ�˵���ƽ�⡣�����ʹ��ȫ����һ��������ת
��������������������Ȼ�����Ǹ�������ת�����п������ͱ��벻�ϵ�����������
��������
���������������һ�ַ������о�ȫ�ߴ��ֱ��������ֱ�����Ϸ���ת������
����Ȼֻ��һ����������ת��β�����ṩ��ƽ�����������ֱ֤����ֱ��ǰ������
��ȥ������һ��ƽ��װ�ã�ֱ������Ȼ����У����ǽ��ڿ��в��ϵ�Χ����������
��ת��
2.1.2 ���������
ͼ2-1չʾ�����ǽ������漸��С���о��Ļ������͡�ע��ÿ����������������
����������ת����
����ֱ����
����ֱ�����dz�������ֱ������Ψһû�в���ż��������������ơ�����3����
��������������е�һ��(ͨ���Ǻ����һ��)����һ�����ϣ����ṩ��һ���Ƕ�
���������Ӷ�ʵ��ƫ��������ֱ����һ����3����������ͼ2-1 ��������ת����Ļ�������
����ֱ����
����ֱ���������ǵ��������е���ƣ����������ٵı�Ҫ����ṩ��Ļ�
е��ƣ�������4����������
����ֱ����
����ֱ��������һ�ַdz����е���ƣ�������Ϊ���߱���ǿ�ĸ���Я��������ͬʱ��Ȼ����һ���������ԡ����䱸6�����������������˵���˽�������Ƴ�
����ƽ������
����ֱ����
����ֱ��������Ƴ���������Ҫ�����غ�����Ҫ����ȵķ���������Ϊһ����
����8����������������ֱ�������κ�һ���綯�������������ֹ���ʱ���ܷ��С�
ʣ�µ�7���ƽ�װ�ý����ַ������ķ��У���������¹ʡ��������˵���˽�������
�Ƴ�����ƽ�ˡ���Y6
Y6�����ǵĵ�һ�֡����ᡱ���������ڻ�����3�����ۡ��ϰ�װ��6���綯����
������������ͨ����ÿ�������¶ѵ���ת�����෴��һ�Ե綯����������ʵ�ֵġ�
������ڳ����ij�Ʒ����ң��ֱ�����Ͽ�����������ơ�����������ͱ�����Ϊ��
��������Ч�ʱȴ�ͳ�ġ�ƽ�桱���Ҫ��20%��25%��
X8
��һ�����еĹ��������X8�����ֻ�����������ȥ����������ֱ����һģһ
������Ҫ�����X8��ÿ��������2�Ե綯������������ȫ������8����
2.1.3 ����
�ִ����˻�ʹ�����ͬ���͵IJ�����������Ϊ���е�ѡ�����̼��ά������
��ά�������ϻ������������õĴֹ���һ����������Ҫ�����Լ���Ϊ��
Ҫ�����Խ���Ȩ�⡣��������е���һ���ϻ����ԣ������ˡ�ǿ׳�������ɣ���ֻ
�ܵõ����е�������������̼��ά�Ȳ����кܸߵ�ǿ��(������)�����ǿ��ܷdz�
������ˣ������������ʱ���ȴ�ľ�ģ�������3D��ӡ�ı�ϩ��C����ϩ�C����ϩ
(ABS)�������֡������ڱ����н�Ҫ�����Ļ�����ΪLittle Dipper(С����)����Ҫ��G-10������ά�Ƴ�(��ͼ2-2)��������Ϊ���ֲ��Ϻܺõ�ƽ����������ǿ
�Ⱥͳɱ���
2.1.4 ����ƽ��
���������������һ�����͵Ļ���������ǰ������������ƽ�ⶼ�Ƿdz���Ҫ
�ġ�������ͷ��ʼ������ƣ����ֻ����ĶԳ���ȷ���������֮������ƽ��ĺ�
����������㲻�ò����ò���ô�ԳƵ���ƣ����Գ����ڻ����ϰڷ����������ʹ
�䱣��ƽ�⡣���˻��ĵ�����������°ڷ��Ա���ƽ��������ѡ��ͼ2-2 ����CNC�������и��G-10������ά����
2.2 ����������������
��С�������ǽ��յĿ��۵�����ֱ���������Ļ����������ӿ����ɣ��Ա��
��綯���Է��к�ͼ������Ӱ�졣�������ӿ�ֱܷ�������ɾ������
�͡��ࡱ��ܡ����ࡱ������·����ӿ�ܣ����������˶���������綯��������
�������ɾ�����ܴ����Ϸ����������з��к�ͨ�ŵ���װ�á�
���������ƽ�̣��ο�ͼ2-3�е���Ƭ��ʶ�����ǡ������Ƿֳ������ӿ�ܵ���
�����֡����A��B��ɡ��ࡱ���(A���£�B����)����C�����ɵ綯������������
4�����ˡ����D��E��F��ɡ��ɾ�����ܣ�D�Ǹɾ���ܵĵװ壻E�Ǹɾ���ܵĶ�
�壻F��������壬װ��������֮��(�ܿ콫����ϸ����)��ͼ2-3 ��Ļ�������Ӧ�ð�����Щ���
ʲô�ǡ��ɾ���
�á��ɾ����͡��ࡱ����������������������������֡����ǵ���˼�����ǿ�
������Ļ���������п���Ū�࣬����ָ������Щ�ӿ���йص����ۺܼ�
����һ���ӿ�������������˶���������������IJ�������һ���ӿ��������
�������������ͨ�������ܼ��������ӿ��֮��ĽӴ��������߸��롣���ڡ�С��
���������Ǹ������ĸ�С������ѹí��ĸ�����������ӿ��װ����һ����Ҳ����
����ѹí��ĸ���������ư汾����һ�����������ӿ�ܡ������ǵIJ����з�
�֣����ߵ��������������ˣ�������Ϊ����ѹí��ĸ�����;ã���ʹ��������
�����ǰ����ڻ������С�
����������ѡ��
���ǵ������á�С�������������������DZ�2-1���ṩ�˼��ֱ�ѡ�Ļ�������2-1 ��С���������������
QAV 250(��ͼ2-4)�ǵ����г������ܻ�ӭ�Ļ���֮һ�������ü�˫����
�ƣ���˼������ɣ�������ֱ���������зdz���Ч��
ͼ2-4 �䱸5��3̼��ά��������QAV 2502.3 ��������
�������㿪ʼ����ʱ��Ҫ�Ĺ���(��ͼ2-5)��
������ͨ�ð���(2.5mm)����һ��������õģ�������������һ���������н�
ʹ��2.5mm���֡�
������֣�����ǯ����732��ĸ���ӡ������κ�һ�ֶ����ԣ��������ʹ��
��ĸ���ӣ�һ��Ҫʹ��������Ӧ������Χ��С�ռ���ͺš�ȫ������Ͳ��ʹ�ã���Ϊ��̫���ˡ�����ǯ���ܻ������������»��ۣ�����ֻ����Ϊ�����ֶΡ�
ͼ2-5 ������������Ĺ���2.3.1 ��1������װѹí��ĸ��
���ȴӻ����ĵײ�(����)��ʼ�����̶��̵�����ѹí��ĸ��(��ͼ2-
6)���ҵ����ܶ���(ͼ2-3�е�B)�����ӵ�ÿ�����ϸ���һ��3mm��С��(��ͼ
2-7)����5mm����˿(���а����ĺ�ɫ����˿)������Щ���Ϲ̶�ѹí��ĸ����
���ֽ���˿����С�ף�Ȼ���ڰ����һ��̶�ѹí��ĸ������˿��Ӧ�ô�ѹí
��ĸ������һ�ഩ��(���������ʹ�õľ��Ǵ������˿)��4��ѹí��ĸ�����̶�
��֮��B�忴��ȥӦ����һ�������������ӣ�����������У���ͼ2-8��ʾ��
ͼ2-6 ѹí��ĸ���������Ƶĸ��Ը��á��������������ĸ�����á������ڷָ������ӿ��ͼ2-7 ָ������B���ϵ�ѹí��ĸ����װ��ͼ2-8 B���ϵ�4������ѹí��ĸ������װ��
����������ĸ�����
��ͼ2-8�У�B��ķ���������ķ����෴�����泯�ϡ�Ҳ����˵�����˻�����
����ӵ�ǰ����ͼ2-8����һ�ˡ�������������ָʾ���Ը���������һ�㣺���ȣ���
��ѹí��ĸ�����ϣ���Σ����ε����˰�װ��(�ܿ콫��ϸ����)ת��������ı�
�档��Ҳ���Դӽϳ�(���߽Ͽ���������Ĺ۲췽ʽ����)�����˰�װ�ױ�����
����ǰ����������ʱҪ��ס��Щָʾ��
>DroneKraft Mach300
�����������Mach300���������н��к�ͼ2-6�dz����Ƶ���ѹí��ĸ�������ܹ�Ϊ���п������ṩ�ܺõļ���
2.3.2 ��2������װ����
��4������(ͼ2-3�е�C��)�����ܵװ�(A��)������̶���һ�𣬱�����˻������°벿��(����)����ɺ��������ͼ2-9��ʾ��
ͼ2-9 ������A��B��C����װ����
�����һ�ΰ�װһ�����ˡ����Ƚ�A���B�����һ��B���ѹí��ĸ�����ϡ�
ȷ�����������ͬһ���������ͨ����λ���˿�(��ͼ2-10)��飬ȷ�������
�ϵİ�����С���롣���û�ж��룬�����ƶ�����һ�����(��ǰ����)��ֱ��
С���롣
Ϊʲô��ЩС���ǹ��εģ�
������Ѿ�ע���ͼ2-10����ʾ�����˰�װ����һ�������3mmԲ��һ����
�β���ɡ�������Ƶ�ԭ��ܼ���һ���ʹ���˿�������۵�����Ƹ�Ϊ��
�գ����ҿ��������¹��л��ͳ������������κ�һ����ǰ�Ķ������٣��۵�
�۽�����б�����̶��۸������۶ϡ�A���B���ϵ����˿�����ʶ��ǰ��װ����һ��3mm��Բ�ף�λ�þ���
3mm���β۵����Ϸ���ʹ��ܿ����۵���
ͼ2-10 �����˰�װ��(ע���۵������Ϸ���ê����)
���Ǽ��������ܶ����͵װ�(A���B��)֮���������(ͼ2-3�е�C��)����ͼ2-11��ʾ��>ֱ������
������м���ѹí��ĸ����Ϊ���ڸɾ���ܺ�����֮���������������
Ӧ�������ܶ���(B��)�Ķ�����
ͼ2-11 �����˶��룬�����뵽���ܶ���͵װ�֮��
���ڣ������һ�����ˣ������ζ˵�����3mmС�������˰�װ���롣��12mm��װ��˿(���а����ij���˿)���������һ��ƽ����Ƥ��Ȧ�����ڣ��ֹ�����
����˿�͵�Ȧ���������е�һ�����˰�װ�ף�Ȼ�����ˣ�����װ塣����
�����3mm�Ĺ��ο�ʼ��һ����˿������������ӣ�����һ�˷���һ��ƽ����Ƥ��
Ȧ������ڵײ�����һ��3mm������ĸ�������˵ĵڶ���С�����ظ���һ����(��ͼ
2-12��ͼ2-13)����װһ������֮�����������ظ�ȫ�����衣
��Ҫ����ĸ����̫��
����ܺ��������˰�װ��˿�ϵ���ĸ���ù������ⲻ������κ��ƻ�������
����ֹ�����۵���Ӧ�ý��������������������ι̵ع̶����ˣ������ֲ��ܹ�����
ʹ����ȫ���۵����ڽ�����һ��ʱ�����۵����ˡ�����ʹ�õ���ĸ��Ϊ������
ĸ�������Ƶ������һ����������ʹ����������Ҳ�ܽ���̶��ں��ʵ�λ�á��ڷ�
�����Ķ��ڼ���У�����ȻӦ�ÿ��Ǽ�鰲װ��˿����ĸ���ɽ��ȡ�
>Blackout Mini Spider Hex
�������������Blackout Spider Hex���������˽��Էdz����Ƶķ�ʽ��װ�ڵ�
���ϡ��㽫��������Ҫ����ǣ�ʹ���ĸ���˿��������������������Ҳ�����۵���
�����ڡ�ͼ2-12 ���ڶ�����˿���밲װ��ͼ2-13 �ڿ�ܵײ�������ĸ
2.3.3 ��3������װ�ɾ����
�����������ǽ������ɾ���ܡ���������ͼ2-3�е�D��E��F��(���ǽ��ڱ�
��������)��ɡ����ǻ���ʹ�����а�����8��37mmѹí��ĸ���������˼·
�ǣ�ʹ��D���E��ֱ���Ϊ��ܵĶ���͵װ壬��ѹí��ĸ�������ǹ̶���һ��
���������ҵ�D�塣���ע����ڰ��Ե��Χ��8��3mmֱ����С�ף������ǵ�
ѹí��ĸ����װ�ס�ȡһ����ɫ��5mm��˿(���а����Ķ���˿)���ֹ����䴩��
����һ��С��(��ͼ2-14)��ѡ����һ���ײ�����Ҫ����Ϊ���ǽ������а�װ����
����ͬ�Ķ�������Щ��˿����Ҫ��Ȧ��
��������ȡһ��37mmѹí��ĸ��������������˿��D����һ��ͻ���IJ���(��ͼ
2-15��ͼ2-16)����������֮�����ð��֡�����ֻ���ǯ�ӽ�һ��������ͼ2-14 ��5mm��˿����D���ϵ�ѹí��ĸ����װ��ͼ2-15 ����һ��37mmѹí��ĸ��������װ��˿����
ͼ2-16 ���ǵĵ�һ��ѹí��ĸ���Ѿ���װ��(�����Ҳ��������)���ڣ����ǿ��Զ�����37mmѹí��ĸ���ظ���Щ����(��ͼ2-17)��ȫ�����
֮��D��Ӧ����ͼ2-18��ʾ��
ͼ2-17 ����D���ϵ����һ��37mmѹí��ĸ��ͼ2-18 D���ϵ�����37mmѹí��ĸ���Ѿ���װ�ã�ΪE��İ�װ��������
���������Ѿ���D���ϰ�װ��37mmѹí��ĸ����Ϊ�̶�E�����������������
û�����һ�����ҵ����壬��ϸ�۲졣�㽫ע�������Ҫ����������ȣ����
��Ե(��D��һ��)��Χ��8����ȫ��ͬ�İ�װ�ף���Σ��������һ������������
(��D��һ��)����E�������װ�õ���������棬ȷ������������װ����������
���룬Ӧ��������ͼ2-19��ʾ�������
ͼ2-19 �ڼ��밲װ��˿֮ǰ����E�������װ�õİ��Ϸ�
������Ѿ��µ���������Ҫ������5mm��װ��˿����E���С����ѹí��ĸ��(��ͼ2-20)�����ȣ��ֹ�����˿���밲װ�ף�Ȼ����2.5mm��������(��ͼ2-
21)��
ͼ2-20 ����һ����װ��˿����E�����37mmѹí��ĸ��ͼ2-21 ����������˿֮��ȷ�����Ƕ��������Ͻ�
>Lumenier QAV250
�����ʹ��QAV 250�������ͻ�ע����������İ�װ��ʽ���������ǵĸɾ���
�ܡ���Ҫ����ǣ�QAV�����˹̶������˰��ϣ�ֻʹ��6��ѹí��ĸ���ָ�������
�ܡ��⽫ʹ�������ᣬ�ʺ��ھ�����Ӧ�á�
�ɵ�Ư��!���Ѿ������������ӿ�ܵĻ������֣����һ�а��ռƻ����У���
������Ӧ����ͼ2-22��ʾ�����������ڿ�ʼ�е�������ֱ�����������ˣ���˵�أ�
>�Ӽ�����˵�����Ǵ�ʱ����ֹͣ�������������������ӿ���϶���Ҫ��װ
һЩ����װ��(��һ���н�������)������������ܻ�δ������һ��ʱҪ����
�ࡣ������ˣ��������ڽ�չʾ���������������(��ʵ���Ϻܼ�)���ں���
���½��н�����ʱ������Բο������е�˵����ͼ2-22 ���ǵ������ӿ�ܶ��Ѿ���װ�ã�Ϊװ�ط��������������
2.3.4 ��4�������������ӿ��
�ٴ����꣺�������������һ����Ӧ���ڵ�2�½���֮ǰ���С����DZ���������
�ӿ���ϰ�װ����װ�ã���һ��Ӧ�ñ�������4�½���ʱ���С���Ϊ��һ���ܼ�Ϊ�������ԣ����ǽ��ڴ�չʾ������Իع˱��»���ƾ��������(�������Ŀ���
�Ը���)��
���ȣ����ɾ���ܷ�������֮�ϡ����ɾ���ܵײ����ĸ�Сͻ��(�м���3mm
��С��)�����ܶ���ͻ�����ĸ���ѹí��ĸ�����롣ȷ���������ָ����ͬ��
���������ȷ�����ɾ���ܺ�����ѹí��ĸ����װ��˿֮�����������ۣ���
���ܵ������۵�ʱָ���ܺ�
��������ܵ�����֮���ֹ������һ��5mm��װ��˿�����ɾ����ͻƬ�ϵ�С
�ף�Ȼ����2.5mm�������������ĸ�ͻƬ�ϵ�С���ظ���һ���̡���ɺ�������ͼ
2-23��ʾ��ͼ2-23 ����˿������װͻƬ(�ڸɾ������)
���´������Ѿ��������ӿ������������������ף�������
����ͷ�����ô������
����������Ķ�����(�����ڿ�˭����Ц����Ȼ������!)���ͻ�ע�����
��û���õ�����һ��壺F�壬Ҳ����������塣�⽫�ڱ����Ժ������һ��
װ����������ڵ�8�������ۣ����Ǿ���������ϸ���������������úͰ�װ��������ó��ϡ�
>�ۿ�������Ƶ
����Է��ʱ���������վ(http:gettingstartedwithdro-
nes.comlittle-dipper-build)���ҵ�һ����ϸ����Ƶ��չʾ�������в������
�����ߵijɹ���
��3�� ����ϵͳ
����ϵͳ�Dz�����������ij�ַ�ʽ���ݶ����Բ����ƶ���һ�������������
�У��������������������ݸ�������������ͨ������ϵͳ���ݶ�������ݵ���
����ʹ�����ƶ������ǵ�����ֱ����Ҳ��һ������ϵͳ������������ת�����ھ���
��������һ����Щ�����
3.1 ������
��õ��������յ㡪����������������ͨ����������������ϵͳ�е���̥��
������̥��ץס·�桱ʹ�����ƶ�����������ץס���������ƶ����˻�����������
��̥���ƣ��������и��ֲ�ͬ����״�ʹ�С��Ӧ�ø��ݴ���ϵͳ���������ǵ�����
������ѡ��ѡ��������ʱ��Ӧ��ע��Ĺ����3�֣����ߴ���ݾࡣ
3.1.1 ����
��ϸ�۲����е���������ע�������������ֲ�ͬ�����Σ��ݾ���෴����Ҳ
��ζ����Щ����������ת�����෴��ÿ�����͵�������������ʽ�����ƣ��ֱ�����
��ʽ����������ǣ��ʽ���������ƽ���������ʱ�������ֲ�������������ʱ����ת
ʱ����������ǣ����������ʱ�������ֲ�����������˳ʱ����תʱ��������������
������һ���������ַɻ���ƽ���ˮƽ��������潫����ϸ���������ǵĹ���ԭ
����
�ƽ�ʽ�������ƽ�ʽ�������ĵ�������Ϊ����ԭ����Ϊ���ú��õ綯���ķɻ���Ƶ�(����
���ֵܵĵ�һ�ܷɻ�)�������������Ӻ����ƶ��ɻ��������Ǵ�ǰ����ҷ�����ͧ
�е��ƽ���ʽ�dz����ơ�
3.1.2 �ߴ���ݾ�
��������������һ��ֱ�Ӱ�װ�ڵ綯���ϵĽ�챣��ӽ�������������(��ʱ
����)ҶƬ���������ijߴ綨��ܼ�������ҶƬ���������ϣ��ߴ���ҶƬ����
֮��ľ���(Ӣ��Ϊ��λ)���������ڡ�С������������5��6Ӣ�������������
�룬������Щ���˻�����ʹ��29Ӣ��(��������)��������!
�ݾ�Ľ���������һЩ�����˴������Ϊ������������ƽ��֮��Ľ�
�ȡ�ʵ���ϣ��ݾ����������ھ�����������ʱ��һ����ת��ǰ�ƶ��ľ��롣��һ��
ľ��˿�ϵ����ƣ�����ֲڵ����ƣ���ϸ��������һ����ת���ƶ��ľ������һ
Щ���������Ĺ�����ʽ�����ȫ��ͬ���ɻ�ǰ�����߿�ͧβ��(��������)������
���ݾ�Խ��һ����ת��ǰ���ľ����Խ�ʹ�����һ�����ݾ�Խ���������Խ
����ת����
��ϸ��������������˱���ķ�Χ����������Ҫ˵��������ʵ�����к�����
�����������ݾ�(��ͼ3-1)���������Ļ���������ɻ���Ӧ���ƶ��ľ����ʵ����
���ľ���֮��IJ��졣����Դ˸���Ȥ����һ���������������վ���зḻ��֪
ʶ��ͼ3-1 �����Ǽ����ݾ����Ч�ݾ�֮��IJ�ֵ
�ݾ�Խ��ÿ����תʱ�����������Ŀ���Խ�ࡣͨ������������ɸ��ߵ�����
ˮƽ�������ķ�������Ҫ�������������Ǻܺõģ�����Ҫע�⣬������Ч����
������Ϊ�������ĵ綯����Ҫ��������(��ص���)����ת�����ݾ����������ѡ
����ݾ�����������ܻ�����������ʱ�䣬���ǻ�ø��������Ĵ��ۡ�
�������и��ֳߴ���ݾ����ϣ�ÿ����϶��������ס���Щ���Ч�ʽϸߣ���������������������ͨ�����ݾ�Խ��(����������Խ��)������������Խ��
�����ķ��������أ�������Ҫ���ٷ��У���ô���ݾ���ߴ�ߴ���������Ƚ���
�롣���ǣ������Ҫ�����������·��и�����ʱ�䣬����ݾ���ͺ���Ϊ���ʡ���
���������д��۵ģ��Ǿ���������������Ч�ʡ�
�ߴ���ݾ���ͨ��ӡ��������������챵�һ��(��ͼ3-2)����0845P����
08X4.5P��ǰ�������ֱ�ʾ�ߴ硪��8Ӣ�磬Ȼ�����ݾ��4.5�㡣P��ʾ�ƽ�ʽ����
������Щ��˾���ƽ�ʽ�������������ֲ������������ƿ��ܱ��ΪL����R������P��
ǣ��ʽ��������ĩβû������ĸ���棬���Ǽ�����Ϊ0845��
ͼ3-2 �����ƽ�ʽ������������ǣ��ʽ������Ч�����������
�����ڡ�С�������Ͻ�ʹ��6Ӣ���3Ӣ����������������������ĺô������
���6Ӣ����ƿ����ṩ����Ķ�������3����ݾ�����нϸߵ�Ч�ʡ��������ͼ
�õ�������ٶȣ����Գ��Խϴ���ݾ࣬��6Ӣ���4.5Ӣ�硣��ס���ݾ��Խ��ͨ���������Ŀ���Խ�࣬���۾�����Ҫ�ķѸ���ĵ�ص�����
3.1.3 ƽ��
�����ڴ��ֽ���̥�����������Ტ�ۡ�������̥��Ҫƽ������ڸ�����˳����
������������Ҳ����ˡ�����һ�����ܵĹ��̣��κΰ����߶��������ա�����ƽ��
������ʱ��һ��Ҫȷ����������ÿ��ҶƬӵ����ͬ�������������ڸ�����תʱ����
������
ƽ����ܼ�����Ҫƽ�����������װ��һ��������ת�����ϡ�����ת��
����ͨ�����ͬ�ķ���ʵ�֡���һ�������˴�����������װ�����룬��������
������������֮�䣬ʹ����ԴӼ���û��Ħ������ת������ת��Ħ������ȱʧʹ��
�����ϵ��κ��ص㶼������������������������ת��
����������ȫ��ֹ�ģ�������ij��������б����ʹ����һ��������ȷ������
���е��ص㣬���ǿ���Ϊ���һ�����ػ��ߴ��ص�һ����ء���ס����Щ����ͨ��
��С��������������ֻ�Dz���С������������ֽ��������ͨ����ɰֽ���Ĵ�ĥʵ
�֡���ȫƽ��ʱ��������Ӧ�����ƶ����κ�λ��ʱ�����Ա�������ҶƬ����������
���档
�������һ��������ƽ�������뷨̫�����ˣ���Ҫ���ġ���ҹ�˾���и�����
״�ʹ�С��ƽ������Ʒ������ʹ�õ��ͺ���ͼ3-3��ʾ��ֻҪ�����ң�طɻ�����һ
��������ͼ3-3 ��ȫƽ��ʱ��������Ӧ�ÿ���ͣ��ƽ�����е��κ�λ�ö�������ij��������
�ִ�������������ʱ�ͼ�����ȫƽ�⣬�����Լ����ָ���һ������һ������
�⡣ͨ����������������Խ�ã�����ʱԽ����ƽ�⡣���˵����������ܽ�ԼһЩ
Ǯ�������㲻�ò���ʱ���Լ�����ƽ�⡣
ƽ����Ƶ
��Ȼ�����ƽ��������û�а��գ���ô��������һ����Ƶ
(http:gettingstartedwithdrones.comprops)������˵�����һ��һ������
���������
3.2 �綯��
����ֱ��������ϵͳ����������ϵͳ����Ҫ���֮һ�ǣ�����ʹ����ֱ������
ϵͳ���DZ��������������У���Ҫ�Ķ�����Դ������������ӵķ��������������������ֲ�����Ҫ�ij����ϡ���ֱ������ϵͳ�У�ÿ������(����������)ֱ������
������Դ�ϡ��������ǵ�����ֱ����������Դ����ˢ�綯����
3.2.1 �ߴ�
��ҵ��ʹ�õ��ִ���ˢ�綯���е綯����ǵĿ��Ⱥ߶ȱ�ʶ(��ͼ3-
4)��2216�綯���Ŀ���Ϊ22mm���߶�Ϊ16mm����Ȼ��������ÿ�ҹ�˾��������ͬ
���������������ڿ��ܵ�����£��ο���������һ�������⡣
3.2.2 �KVֵ
���������ˢ�綯�������Ͽ�������һ�����ָ����KVֵ�����ֵ�������ǣ�Ϊ�綯����Ӧ1V��ѹʱ��ת��(rmin)����һָ�����ڵ綯������Ϊ0ʱ��õģ�����ʵ�ʵ�ת�ٽ���Ħ�������ر仯���仯�����ڣ����Խ���һ�ֵ�������
��ѹ��ת�ٵı�������ص�ѹԽ�ߣ��綯����ת��Խ�죬���ǶKVֵ��Ȼ��ͬ��
ͼ3-4 ��Щ2204�綯���ĶKVֵΪ2300���ɴ���5Ӣ���6Ӣ���������ת�ٵļ���
�KVֵΪ900�ĵ綯��ʹ��12V���ʱ��������״̬����ת�ٶ�Ϊ
10800rmin(12��900)��ͬ���ĵ綯��ʹ�ø���ĵ��(16.8V)ʱ��ת�ٶȽ�Ϊ
15120rmin��
3.2.3 ������ʵ�������
���ݴ������������ÿ���綯��������ˮƽ��������ͬ��������ͨ������Ҫ��
�⣬��Ϊ�ֵ綯�������̶��ṫ���綯�����Ƽ����������Ϊ��ȷ����ȷ��
�����������Ӧ���˽����˻����ʱ�����������ƻ����������˻�Խ�أ���Ӧ��
���������̵Ľ���ѡ��������������
3.3 ������
�ڵ綯����������������У��㳣����������������������ָ����ʵ��Ӧ
���е綯����������ϲ�����������������ͨ���Ա�ʾ���żӵ����ʱ����������
������ֵ���(�������̶����ṩ��һ��Ϣ)�������ڡ�С��������ʹ�õ�
2204�綯����6Ӣ���3Ӣ��������������Բ���539�˵�������������ı�������������ֵҲ���ı䡣��Ȼ����һָ���Ƕ�ÿ�ֵ綯�������������������ġ�Ҫ������
��ֱ���������������Խ���Ľ������ֱ����������(��������ֱ������4)����
�ڡ�С�������������2156��(4��539��)������!
���㸺������
����������ÿλUAV����߶����붨��Ĺ��֮һ�����Ƿ����������������ȫ
��(All Up Weight��AUW)�IJ�ֵ��AUW�Ƿ�����Ϊ��������װ�����֮��������������綯��������顢��������豸�����������ڣ������Ѿ�֪����μ�������
�������Լ���������������������AUW��ȷ���������ĸ���������
3.3.1 �����ٶȿ�����
�����ٶȿ�����(Electronic Speed Controller��ESC)�����ڶ���������
��ֱ������ÿ���綯���ٶ��뷽���С�͵�·�����ǵķ������ϰ�װ��4��ESC��ÿ������רΪ��ˢ�綯������Ƶġ����ǽ������������ĵ���ת��Ϊ�����ź���
�У�ͨ��3����ͬ�ĵ��߷�����ˢ�綯�����ź����п����ٶȡ���ת�����綯����
�ƶ����ܡ�ÿ���綯������Ҫ���ٶȴӷ��п��������ݸ�ÿ��ESC�����ǽ�����һС
�ڸ���ϸ�ؽ��ܡ�
���ࣺ�������ѹ
����ESCʱͨ��Ҫ�鿴������Ҫ�Ĺ�����͵�ѹ��ESC�Ķ��ѹֵ������
�ڸ�ESC�ĵ�ش�С(���ǽ���3.3.2�ڸ���������۵��)�����ڣ����ǽ���ָ
����������ʾ�����Ƕ��ѹ12.6V����о��ء��㻹�ǵ�����������ʱ�ᵽ�ĵ綯
�������𣿹�����ͨ��Ҳ������AΪ��λ�ĵ������������Ϣ����ȷ����ָ����
��������������Ҫ�����ͺŵ�ESC��
SimonK�̼�
����ҵ�����˻���ESC�����������������ߵ�ң�طɻ������������ܵij���
�У�RC���������ɡ��Ʊȿ�����һ��ҵ�༶��ESC�Ŀ�Դ�̼�������̼���ǡ���س�
ΪSimonK�̼�����������Ϊ�綯���ṩ�˸������Ӧʱ�䣬�������˷���������
���ԡ�������ESC���������ڶ��ṩרΪ���������������SimonK ESC(��ͼ
3-5)��
ͼ3-5 ������ʾ����ʹ�õ�ESC�����Ϊ12A������ѹΪ16.8V(4S���)
3.3.2 ����
�Ե����������˻��������а�������Ҫ����֮һ����﮾ۺ���(Li-Po)��ء�
���ֻ���غ����ƣ�����һ��������(NiCD)������(NiMH)�����ȣ�﮾ۺ���
����и���������C�����ȡ���Լ��������UAV���յĹؼ��������͵�ѹ
���ִ�﮾ۺ����ض��Ǹ��������͵�ѹ����ġ�����﮾ۺ����ض���
ͨ��������ص�Ԫ�ڲ�����һ���С�ĵ��о�ﵽ���յ�ѹ�ġ�ÿ�����о�Ķ
��ѹΪ3.7V(������Ϊ4.2V)������ζ�ţ���������ʾ�IJ�Ʒ��ʹ�õ�3о��ض�
����ѹΪ11.1V(3��3.7V)�����������Դﵽ12.6V(3��4.2V)��
�����ļ�����λ�ǰ�ʱ(A��h)����˵������ijһ�����µ���ܹ������ʱ����
10A��h��ؿ���Ϊ1A���豸����10h��ͬ���ĵ����5A������ֻ�ܹ����Լ2h������
ʹ�õ����е�ض���һ����ĺ���ʱ(mA��h)ֵȷ������(��ͼ3-6)�������
Ϊ2200mA��h�ĵ����������1500mA��h�ĵ�ء������ϣ������صĹ���ʱ���
1500mA��h�ĵ�س�30%���ϣ����ǣ���ʵ�ʷ����п��ܲ�����ˡ�2200mA��h��ص�
��������1500mA��h��أ���Ҳ����ζ������ֱ����������Ҫ���Ѹ���ĵ���������
��ʼ���ն���������һ���ƽ�⡣
��Ȼ﮾ۺ����ؼ��������ǰ��ã�����������Ȼ��ijЩ���㡣��һЩ���
�£����ֵ�ػ��ò��ȶ��������������!
��ˣ���ʹ��﮾ۺ�����ʱӦ��ʼ�ձ��ֽ����������ĵ�أ�����Ҫʹ
��������ĵ�أ���������ȡ��֮��!�ڳ��ʱҪʹ�÷��������ƽ��һ�������
���ӵ��������Ȼ��ط��������������ܵط�����Χ�Ŀ��ڡ��������е�
�������һ�������⡣
ͼ3-6 2200mA��h3о�����
���������������鷨���ǣ�����Ҫ����ĵ�طŵ絽����ÿо3.2V������ζ�Ŷ���ÿ��3о��
�أ��ŵ絽����9.6V����������Ƿ��֣�����ÿо3.5V����3.4V�ľ����ߣ���
�����������㹻�ġ�ȼ�͡�(Լ20%)��½��ʹ��ش��ںõ�״̬�����ң�Ҫ���ⴢ
�������ĵ�ء��ֺϸ�ij��������һ���������ã�����������ʹ��شﵽ
ÿо3.8V��ˮƽ�����ܹ������ӳ���ص�������
3.4 ��������
�ⲿ�ֵ�������Ҫ���²���(��ͼ3-7)��
�������ͺ���
��Helping Hands���������о�ϵͳ
���ȷ�ǹ
��12��(����ĸ)2mm������ͷ
����Ӣ�糤��18Ӣ��������
����ǯ�����ǯ
��ͨ�ð���
��С�����ߴ�
��˫�潺��
������ͼ3-7 ������Ҫ�IJ��Ͽ��治��
3.4.1 ��1������װ����
������Ҫ���ĵ�һ�������������Ϲ̶�PDB��λ�á���������ʱ�������÷�
ͭ��G-10����PDB(��ͼ3-8��ͼ3-9)�������г��ϻ����������Ҫ������۰�
�������PDB�dz��ʺ���װ�����ǵ��������롣���ȣ���PDB�ı���ճ��һС��˫
�潺(��ͼ3-10)��ͼ3-8 �ɷ�ͭG-10�и���ɵ�DIY����ͼ3-9 �������ǵ�PDB��ۡ��������ڼ�������Ϳ�Ϻ���������Һ�彺����Ϊ��Ե��ͼ3-10 ��PDB�ı���ճ��˫�潺
���ڣ���PDB��ѹ�����ܵ�����λ�ã�ʹ��ؽ��ߡ�ESC��������Ҫ��Դ��Ԫ
����������������(��ͼ3-11)�������Ҫ����˿�ӹ̣�����������һ��3mm��С
�ס����Ƿ��֣�˫�潺�ܺõع̶���PDB�����ѡ��ʹ����˿����������Ҫʹ��
��˿�����Գ���ʹ��С��������˿����ĸ���������Խ�Լ���������Ҳ����Ϊ���塣
ͼ3-11 ��PDBѹ����λ
3.4.2 ��2�������Ӳ�����ͷ
��һ���ǿ�ѡ�ģ����ǿ���ʹ��װ������ø������ɡ�������ͷʹ����Խ�ESC
�͵綯�������������߶Ͽ���������Ҫֱ�ӽ����Ǻ�����һ��ʹ�����ַ����ĺ�
����������ά��������������ȱ�����ǿ�����Ϊ��ͷ��������ֹ��ϡ��������
��ͷ�����ܵ�������ֱ������(4���綯���е�һ��ͣת������ʯͷһ������
��)��֪������Щ���ף���Ϳ�������Ϊʲô���������ӷ�ʽ��˵����ˡ����ǽ�
�����Լ������Ƿ�ʹ�ò�����ͷ�����DZ���ٶ��û���װ���ֽ�ͷ�����������ʹ
�����ǣ����ǽ���ֱ�Ӻ��ӣ������������ܷ⡣�ڼ�������֮ǰ��һ��Ҫȷ������
��ȷ!
ȡ���о߲�������������������!�͵����ϼ������н�ͷһ����������ͷҲ��һ�Խ�ͷ��ɣ�һ��ĸ��ͷ��һ��
����ͷ�����ǽ�����ͷ��װ�ڵ綯���ϣ�ĸ��ͷ��װ��ESC�ϡ��ⱻ��Ϊ����õ���
������ΪESC��һ�˿����ṩ��Դ��ĸ��ͷ��û�в����κ��豸ʱ�����ṩ���α�
����
��4���綯���е�һ����ʼ����3���綯���������ϰ�ȥ��Լ18Ӣ��ľ�Ե�㡣
���������������ϼ�����������Ϳ�ڵ綯�������ߵ��ⲿ(��ͼ3-12)��
ͼ3-12 ��ȥ�綯�������ߵľ�Ե�㣬�����������Ϲ���ͷ
��һ�κ��ӣ�
�������Ķ�����һ����Make��ϵ�д��飬�������Ǽٶ����ȥ�Ѿ��ù�����
��������ֻ�ù�һ�Σ�Ҳ����ÿ�춼ʹ�ã����Ǽٶ�����乤��ԭ���л�������
�⡣�������һ������ȫİ��������ϣ����ϰһ�£�������
http:gettingstartedwithdrones.comsoldering��ҳ�ϲ�����ϸ�ĺ��ӽ̡̳�
�����������ǽ�ʹ�üоߣ�Ϊ�綯�����������ӹ��Ͳ�����ͷ����������ͷ��
������һ��������ϣ������Ϻ����ĵ綯������������һ��������ϡ���ʱ��ȷ
����������������������λ���ϣ��Ա�������ɵز�����������һ���������Ҫ
���������ã����������ڲ�����ͷ��Χ����������֮���ڽ�ͷ�ڵ������ڵ�λ��
�ϵ�һЩ������������Ϣ�μ�ͼ3-13��ͼ3-13 ����Ԫ�����Ѿ�λ�������Ѿ����ú��ӵ�һ����ͷ����
ʹ��������������Ҫ���������һ��������ͷ��һ�˽ӽ��������ƿ������ͺ�
�����ý�ͷ��ȴƬ�̣�Ȼ��Ӽо���ȡ��(��ͼ3-14)��
ף����!���Ѿ�����˱�������Ŀ�еĵ�һ�κ���!�о�����ϣ����ˣ���
Ϊ�㻹�кܶ�����Ҫ���������Ǽ�����!
������ȴ֮�Ӽо����ƿ��綯�������ߺͲ�����ͷ���ظ��������裬����
���������綯�������ߺͲ�����ͷ����һ���綯�����֮��ʣ�µ�3���綯����
����Щ���衣���ʱ��4���綯����ȫ����������Ӧ�ú�����12�����Ͳ�����ͷ(ÿ
��������1��)��ͼ3-14 ���ǵĺ����ڼо�����ȴ
������ʱ��Ϊ��ͷ���Ͼ�Ե���ˡ���һ����Ҫ18Ӣ�������ܺ��ȷ�ǹ(���û
�еĻ������ô����)������3��0.5Ӣ��������ܣ����ɵ������º��IJ�����ͷ
�ϡ�������Ӧ�����ڽ�ͷ����ͻ��IJ��֣���Ϊ���Ͳ�ͷ��ǰ�˽��嵽ĸ�Ͳ�����
(��ͼ3-15)��������ǵ��������谭�����ӣ������γɲ��ɿ��IJ��������Խ���
�Ͳ�ͷ��ĸ�Ͳ������Ӽ��Σ���������λ�á��⽫��������õ�����������Ӧ�÷�
�����Ӽ��ϵ��ĸ�λ��(����Ҫ���ǣ���Ӧ�÷����ĸ�λ��)��ͼ3-15 �����ܾ�λ���ȴ��ȷ�ǹ����
����������֮�������ȷ�ǹ�����ǽ��º͵�Ϊ�����ܼ���(��ͼ3-16)��
�������źã��Ա�ÿ�μ���һ�����ر����������һ���̻�����Ϥ������¡����
ʹ�õĴ���������ȷ�ǹ�ķ����ϴ�һ��ҪС�ģ���Ҫ���ȷ紵�����㾫�Ķ�λ
�������ܡ���ȫ��3��������Ӧ����һ���̣�����Ӧ�õõ���ͼ3-17��ʾ�Ľ������
���ܵ�����ֻ��Ҫ���Ѽ����ӡ�һ������������ס��ͷ�͵��ߣ��Ϳ��Լ��������
�����ˡ�ͼ3-16 ʹ���ȷ�ǹ���þ�Ե�õ�����������
ͼ3-17 ��Ʒ�������ڿ�ʼ��������Ľ�չ����ʱ��4���綯����ÿ�������߶��Ͳ�����ͷ��
�̵غ�������һ�𣬲���С�ĵ��������ܾ�Ե�����ڣ�������ESC�ϵ�ĸ�ͽ�ͷ����
ͬ���IJ����ˡ������㹺���ESC�ͺţ���Щ�����Ѿ������˲�����ͷ������Ѿ���
�˽�ͷ����������Ƿ�����Ĺ��͵綯����ͷƥ�䡣�������������������������
�IJ��衣
�͵綯��һ�����ҵ�ESC������3����ɫ����(�����ŷ�ϵͳ�IJ�ͷ������ԭʼ
�ĵ���)����ȥ0.125Ӣ�糤�ľ�Ե�㣬�����ӡ����ӵIJ���͵綯��һ����Ψһ
�IJ�֮ͬ������κ��ӵ���ĸ�ͽ�ͷ(��ͼ3-18)������㻹û����ͷ�����γɸ�
��ٹ̵�ӡ����ô�ͷ����ظ�ǰ��IJ��衣
ͼ3-18 ���ӵ�һ��ĸ�Ͳ�����ͷ
�������н�ͷ�����þ�Ե��֮��������һ�¹��ͽ�ͷ��ĸ�ͽ�ͷ��Ҫ��Ե
���ֵIJ�𡣹��ͽ�ͷ�õ���0.5Ӣ�糤�������ܣ�ĸ�ͽ�ͷ����Ҫ1Ӣ����߸���
(��ͼ3-19)�������ܲ�Ӧ������ͷ�ļ�ˣ���һ�����ӳ�������֮�ϡ���ס��������������ʱ�������Σ������ڼ���ʱ�����ܴӽ�ͷ�ı�Ե������ͨ������
������������ͷһ���λ�ã�����������֮����֮���롣����������ַ�������
������������Ե�������õ�ƬС�ĵظ���谭�ȹ����ӵIJ���(��ͼ3-20)��
ͼ3-19 һ��ҪΪĸ�ͽ�ͷ�и���ʳ��ȵ�������ͼ3-20 ������֮��һ�п���ȥ���dz�����
��ʱ�������Ѿ�Ϊ4���綯�������˹��Ͳ�����ͷ��Ϊ4��ESC������ĸ�Ͳ�����
ͷ�������û����ɣ��������Խ����Dz���һ�𣬿����Ƿ�ƥ��(��ͼ3-21)��ͼ3-21 �ɹ���һ�ж�ǡ���ô�
̫�����ˡ��������ڽ�����ϵͳ��װ�����˻��ϡ���ʱ������������������
�飬��������һ����ϲ���ĵ��İɣ�������Ӧ�õĽ���!
3.4.3 ��3������װ�ٶȿ�����
�����ٶȿ�����ͨ�������ְ�װ��ʽ���ڿ���ϰ�װ�������ڿ�������������
���ϰ�װ���Ա�������������������еõ������ɢ�ȡ���Ϊ���ǵ������������
�����ǿ����۵��ģ��������ǽ��ٶȿ�������װ�������ڲ�����װʹ��˫�潺
��������Լ0.5Ӣ�����һС����������ESC��һ��(��ͼ3-22��ͼ3-23)�����
ESC�������Ƿ�ͬ��ƽ̹����ʱ��ESC��һ�������һ��ͻ����Բ�δ���ݣ����
�㷢�����������������������һ�ಢ���������ճ��һ�������������Եõ���
��ĸ��������ͼ3-22 ��ESC��ƽ̹��һ������һС��˫�潺��ͼ3-23 ��4��ESC�ظ�����
��ESC�����ý���֮�����潫������ӿ���С�����һ��ESC��ȷ�������ϵ�
���Dz��Ѿ�˺�£�����װ����������PDB��װλ�õ���Χ�ҵ�һ����λ��������
�������λ��Ϊ�ĸ����ޣ���ÿ��ESC�ŵ����Ե�λ�á���ESC������ĺ�ɫ�ͺ�ɫ
��Դ����Ӧ��ָ�������ģ�����һ����ʹ�õĺ�ɫ�綯��������ָ���ⲿ��ȷ��
ESC�ķ��ø߶����������������һ��ESC�����ͼ3-24��ͼ3-25��ͼ3-24 ��λESC��Ȼ����ѹ����λ��ȷ���·����㹻�Ŀռ������һ����Ԫͼ3-25 ������ESC��λʱ��Ӧ���籾ͼ��ʾ
3.4.4 ��4�������ӵ�Դ
��һ���Ǻ��ӵ�Դ����������ǽ�ÿ��ESC��������(�ֱ��Ǻ�ɫ�ͺ�ɫ��)��
�ӳ�һ��������·������㲻��Ϥ������·��Ҳû��ϵ������һ���ܼĸ���������к�ɫ��(����)������һ�����к�ɫ��(����)������һ��ͼ3-9���
��˵�������ֹ�����ʽ�����ǵĵ�·������һ��������ͨ·��һ�����ߵ�ͨ·����
��ESC������ص缫�������ӵ�PDB��
���Ǵ�һ��ESC��ʼ����Ϊ��һ�����ӡ�ȷ��ESC�������ĺ�ɫ����Ҫ�����
��Ч�ؽӴ�����Դ����(�����ǵ�������������ͨ·)�����ڣ�����������һ
����(�����Գ�һЩ���Է���һ)�����´���ͷ��ʼ��18Ӣ���Ե�㡣Ȼ������
������¶�ĵ��������������ӵ�PDB(��ͼ3-26)��ͼ3-26 ����һ��ESC��Դ��������Ȼ�����ӵ�PDB
����������֮��ȷ���������ļ�˸ɾ���Ȼ���ټ�����������������������
����ǯ��סESC���ߣ��̶���PDB��Ҫ���ӵ�λ�á�ȷ��������λ���Ƕ�Ӧ��PDB��
·���������ǵ�����������һ��Ҫ���������ĵ�·�ϡ�����������߷�������
ͷ��PDB֮����ȡ��������Ԫ���϶����㹻�ĺ���������Ӧ�ú����������Ϊһ
�塣�����һ�����ƿ������������ü���ǯ�̶��������ӡ������ע��۲캸
�����ͻῴ�����ڼ���֮�ھ���ȴ�ˣ���ʱ��Ӧ�ó�������ĥɰ����ۣ�������Һ
�����״��һ���ﵽ������Ч�����Ϳ����ƿ�����ǯ��������ӡ�������ӻ��Ǻ�
�ɣ��ظ���Ҫ�IJ��裬ֱ�������ι�(��ͼ3-27)��ͼ3-27 ���ǵĵ�һ�������Ѿ����ã������ƺ����ι�
��һ���������߾�λ֮��ͬһESC�ϵĸ����ظ�����ͬ���IJ��衣Ψһ��ͬ
���ǽ��������ӵ�PDB�ϵĸ�����·(�����ǵ����������Ҳ��ͨ·)����ͼ3-28
��ͼ3-29��ʾ��
�˲���!��ĵ�һ��ESC�Ѿ����ӵ�PDB��!���ڣ�������ESC������ͬ�Ĵ���
(��ͼ3-30)�����������������ESC�Ľ���λ�á���Ҫ����ؽ�������̫����
��Լ�ռ䡣�����������һ��������ͼ3-28 ���뺸��������ͬ�ķ�ʽ���Ӹ�����ȷ�����ӵ�������·����ͼ������ײ���ͨ·ͼ3-29 ���ǵĵ�һ��ESC�Ѿ������˴�PDB��ȡ��Դ����
���ǵĺ��ӹ�����������ˡ�����������Dz����������ˣ�ʣ�µ�Ψһ���ӹ�
��������������ߡ����ESC���ߵ����ӷ�ʽ��ͬ����ȥһ�˵ľ�Ե�㣬�������ü�
ǯ��ס�����ȡ�һ��Ҫ���ӵ���ȷ�ĵ�·������Ҫ�������ι̡�ͼ3-30 ���ǵĻ����е���һ�����ӣ���������ESC�Ѿ����ӵ�PDB
�����
���ڣ���ֻ�ڷ�������������ijһ������Ԫ�������ǣ�˭֪��δ������ô����
Ԥ�����üƻ�����PDB�����Ӷ�������õ�Դ�������ڽ������ܼ����Ԫ�������Ǻ�
�õ���������ͼ3-30�У����ע������Ѿ���ô���ˡ���������ĵ�Դ��·����
��һ��JST��Դ��(���ϻ������־�����)����������������ڸɾ���ܺ�����
֮�䡣������Ҫ�����豸(����Ƶ�����)ʱ������Ҫ���ľ��������Ǹ���ͷ����
���Դ��û�б�Ҫ�ٴ�ʹ��������!
3.4.5 ��5������װ��ˢ�綯��
��С������������С�����˻����õ���ˢ�綯�����ڲ��Ϸ�չ�������ǿ�ʼ��
д�����ʱ���г���ֻ�м����ͺţ����˶�ʹ�����ǡ������˼����£��ͳ�
���˼�ʮ���ͺţ������������ڲ������ӡ��������ֲ��ϱ仯�ľ��棬���Dz�����
ר�Ž���ij�������ͺţ����ǽ������������в�ͬ�ͺŵ�˼·���������ϰ�װ�綯���ĸ���dz����ҵ��綯���Դ��ĺ��ʳ��ȵİ�װ��˿
(�����ж��ֳ���)����������Բ���ϵİ�װ�ף�����綯���ײ����ݿס�����š
�����ֵ��Խǵ���˿�������������ϸ�����̥ʱһ����
ע�����Ʒ���!
ע�⣬�綯������һ���̶����������ᡣ����������ƣ�������ij���ʺϸ���
�Ƶ���ĸ(����֧����ĸ)����������ʩ��ѹ���������ڵ�С�����˻��ϣ�������
�ƶ��DZ���˳ʱ�����ơ���Ϊ���ǵĵ綯���ȿ�����˳ʱ�뷽����תҲ��������
ʱ�뷽����ת����������ʶ�����������б��ͷ������Ƶĵ綯��������������
��������ת�������Ͻ���ȷ�����������ת����ʼ��������������ת�����෴��
˳ʱ����ת�ĵ綯��Ӧ��ʹ�÷������Ƶ��ᣬ��ʱ��綯����ô��������
���ᡣ
ע�⣺���������������̶���ô����������������Ȼ�����е綯����ʹ�ñ�
���ơ�����Ȼ���Թ����úܺã�ֻ��һ��Ҫȷ���Ͻ��������ڼ��(������ζ�Ҫ
��ô��)��
������λ���Ԣ���ǣ�ʼ��Ҫ֪���綯������������ͣ�ȷ����װ����ȷ��λ
�á������Ҫȷ�ϵ綯����ת�ķ���Ҫ�ڹ̶���������֮ǰ��ɡ���������
�ġ�С���������ڶ��������Ϸ���ĵ綯����˳ʱ����ת���������Ͷ��Ϸ���ĵ�
������ʱ����ת��
��װ���̵ĵ�һ���ǽ��綯��ƽ��������֮�ϣ������˵ײ��İ�װ����綯��
�ײ������ƿ���(��ͼ3-31)��ȷ����������Ʒ������Ԥ�Ƶĵ綯����ת����
��˵����ȷ�ġ��������Ӧ��˳�����˵ķ���ȷ�����Dz����������������졣ͼ3-31 ���ǵĵ綯��ƽ�������������̶�
�����ֶ�����һ����˿�������˵ĵ綯����װ�ף�����綯���ײ������ƿס�
���֮����Խǵ���˿��ֱ��4����˿ȫ����λ(��ͼ3-32)��ͼ3-32 ���մ�������������ĸ�ķ�ʽ�̶���˿��ȷ���������
������˿����λ֮�������Ͻ��Խǵ���˿�����ƴ�������������ĸ�ķ�ʽ
(��ͼ3-33)��ͼ3-33 �����Ͻ���˿��ȷ������
���ڣ���һ���綯���Ѿ���װ��λ��������װ����3������Ҫ����ע�ⰲװ����
�Ʒ���!
��װ������!
���ڻ���Ҫ�����������ӵ�����ϣ���������ȷ��һ�ж�����֮������һ
����������Ҫ�İ�ȫ��ʩ��
3.4.6 ��6����������ˢ�綯��
���ǵ���ˢ�綯����ͨ��֮ǰ���ӵ�������ͷ��3���������ӵ��ٶȿ���������
�������ˢ�綯������İ������ʱ���ܻ�ע�һ������ֵ��£���Щ����û�б�
ǩ�����ǣ�������ԭ��ģ���ˢ�綯�����ٶȿ����������ӷ�ʽ�����д���ֻ�е�
������ת����IJ�ͬ�����������3���ߵ�����������ӣ����綯����������
˵���κ�һ����϶����ᡰ������ֻ������綯����ת����IJ�ͬ�����ǵ��ռ�Ŀ����ʹ���������Ϸ���ĵ綯������ʱ�뷽����ת��������Ϊ��
�ǵ�������û����ɣ�ֻ��Ҫ�����Ƕ������������ڱ����Ժ���½��У����ǿ���
���в������ҳ���Ҫ�ı䷽��ĵط������ڣ�ʹ�ò�����ͷ�ļ�ֵ���Զ�����!
���������һ�����ò�ֱ�Ӻ���Ԫ������ô�ѶȾ�Ҫ��ö���!�����ʹ�õ���
�������в�һ�����ο��Զ���ʻ�ǵ�ʹ���ֲᣬ�Ա�ȷ�ϵ綯���ķ���
3.4.7 ��7��������
��ʱ��ʹ�����ߴ��������߽���������һ�������⡣��������й���֮ǰΪ��
�ȿ������������ŷ��������Ҳ�����档�⽫�ڱ��������Ŀ�Ĺ�����ʹ�������
�ɡ�����ͨ����ϸ�ļǺűʻ����������ESC�����ϱ�ǵ綯����š�
3.5 ��
���ڣ���Ӧ���Ѿ���װ�����ٶȿ������͵綯����ȷ������Ԫ���İ�װ����
�̣����̶Ƚ������ѵķ��ա���Ҫ�����������������ϵ����к��㣬ȷ��û
���������綯�����ٶȿ�����֮�������Ӧ�û�����ʱ�ġ����ǽ��ڱ������
��װ������Ԫ��֮���ٻص��綯������������
��4�� �������
4.1 ʲô�Ƿ��п�����
�Ӹ�����˵�����п����������˻��Ĵ��ԡ���ͨ�����ִ�������ÿ�������ٴ�
�ز��������������ܣ�Ȼ�����ÿ���綯��������ϸ���ڣ���֤�������ڿ��е�
�ȶ����������ڽ�������ʱ��������������߹���ƽ̹�����е�������ʱ����
������Ҫ˼����̬�ı仯����ֻ��Ҫ�����ߣ����Իῼ����Щϸ�ڲ�ִ�У����ͬ
ʱ��Ψһ���뷨���ǡ���ǰ�ߡ������п�����������������ˡ����������˻���
���ÿСʱ10Ӣ��(1Ӣ��Լ1.6ǧ��)���ٶ�ǰ����������ʱ�����п���������
��������������ֽ�Ϊ���ÿ���綯����ÿ���������������ʵ����������
�����������˻�����ij������(�����)�����п�������ͼ��������ı仯�������ʻԱ�Ķ������룬��Ȼ�ܹ�������´������
4.1.1 �Աȿ�Դ���Դ
���Խ������ϵķ��п�������Ϊ���ࣺ��Դ�ͱ�Դ�����еĿ�Դ���п�������
��APM(AudruPilot)��Open Pilot��CC3D��Sparky��MultiWii�ĸ��ֱ��֡���
Щ��Ŀ��һ����ͬ�㣺�κ��˶�������������Ĺ����ļ��������������Լ��ı�
�֡����ǹ����㻨һ��ʱ���������о�����������Ŀ�����Ƕ��кܺõ��������ṩ
�ḻ��UAV֪ʶ��
��Դ���п������и��ָ��������á���Ϊ���е��д�(DJI)��Wookong��
Naza�Լ�X-Aircraft��Super-X��Mini-X����Щϵͳͨ����ר��ϵͳ���û�����
�������������롣
4.1.2 ������
���п������ĺ����ǹ��Բ�����Ԫ(IMU)����ͼ4-1��ʾ�������Ԫ����һ��
���������������п�������ط������Ļ������͵Ĵ������������ټơ�������
����ѹ�ơ���Щ�����������������ļ��ٶȡ���ת�ٶ��Լ���ѹ(���������Ի���
���ɻ��ĸ߶�)����3���������ṩ���Զ���ʻ�Ա��ַ����������ȶ������������
���ݡ�ͼ4-1 ������п��������ڽ���IMU���ⲿ�������˿�
��IMU֮����������ڸ����ܵĴ���������Щ����������GPS���ջ�������
�ơ������������Ϳ��ٴ�����������ʱ������ƣ����ǻ�������������п�������
�������Ĵ���������������ɸ�Ӧ���ܡ�������Ӿ����˹�����(AI)����
��
������APM�������������(IO)���ӵĸ�����
�������1��8
��Щ���ӽ����ӵ����ǵ����ߵ���ջ����ӵ����ռ�����ָ����ݸ�APM��
GPS
����˿ڽ����ӵ����ǵ�GPS��������
I2C(�ڲ����ɵ�·)
����һ�������ļ�����������ߣ����ڶ������衣�������ǰ�ù�
Arduino��������ϤI2CЭ�顣���ǽ�ʹ������˿������ⲿ���̡�PM
�������ǵĵ�Դģ��˿ڣ����ǿ���ͨ������ص�Դ��
JP1
����һ�����߶˿ڣ����ڸ���APM��һ�����õĵ�Դģ�顣
�������1��8
��Щ���ӽ��ṩ�����ٶȿ�����������źš����ʹ��ģ�ͷɻ���APM����Щ��
�ӿ�����һ���ŷ�װ�÷����źš����Ҫ��APM�������˻��ϰ�װ������ͷ����Щ��
�ӻ������ṩ��̨�����������롣
Telem
���ǵ�ң���̨�嵽����˿��ϡ�
A0��A11
��Arduino��һ������Щ���û��ɷ���ģ�����š������в�ʹ�����ǡ�
4.1.3 ��������
��Ȼ��������һ���̶��ϵ���������ÿ�����п�����ͨ�������Լ��ķ�����
�ԡ���Щ��������Ϊ��ճ������ֱ�������Էdz������ط��С����ַ��������ܵ�ӵ
�нϴ�������ĺ�����Ӱʦ������Ƶ�����˵������������������ܸ����ɴ���
����������Ȩ���У������һ�˳��ӽDZ���ѡ�����õ��豸��
4.1.4 ��������
�����ִ����п���������ij����������(��ͼ4-2)���������û����ʷ��п���
���е�������Ҫ������ijЩ�������ֱ�����ͬ���Ʒ���ȶ�������ͨ�����ܿ��Ʒ�
�������á�ͨ�����ú��Զ���ƽ���������ֿ���ͨ��������USB����ң���̨���ӣ��������ƶ�������ƽ̨��ͼ4-2 �ڰ�ƽ�������е�3D Robotics Tower���п�����Ӧ��
���ǽ�ʹ�õ�����������Misson Planner��������һ���ڽ��ĵ���վ����ʹ��
��Ӧ���ܹ���ʾ�ӷ��������ص���Ҫ��Ϣ�������λ�úʹ������������ӵ������
��Щ��Ϣ����ijЩ���͵ķ��о��м���İ���(���ͼ������ũҵ�������)��
�κ����͵ļ�������Ҳ��ʵ�ʵ���;��
��������Ķ�����ʱʹ�ô����������������Ardupilot��Mission
Planner����(http:ardupilot.comdownloads)�����ʹ��Mac��������
APM Planner���档
4.2 ��������
�ⲿ�ֵ�������Ҫ���²��ϣ���1Ӣ��˫�潺��
������
��ϸ����ʻ��Ǻű�
��С���ߴ�
4.2.1 ��1������װ���п�����
APM���п���������װ�ڸɾ���ܵĵװ��ϡ��ڷ��п����������˸�ʹ��һС��
˫�潺��������̶��ڿ����(��ͼ4-3��ͼ4-4)������ʹ�ô�Ƭ�Ľ��������Ժ�
����ȥ����˫�潺����һ���ĸ��������ԣ�����ͨ��Խ��Ľ���Խ��(��һ����
�ȣ�����Ҫʹ��0.5Ӣ���)��ȷ��APM���п���������ǰ�ļ�ͷָ��UAV��
ǰ�������п�����ֱ�Ӷ�λ�ڿ�ܵ����룬Ȼ�����Ƶ�λ(��ͼ4-5)��ͼ4-3 ���´�Լ1Ӣ��˫�潺����װAPM
ͼ4-4 ������һ��Ϊ��������APM���ˣ�Ȼ��˺ȥ����ͼ4-5 ��˫�潺��¶������£���APM��������(ȷ����ָ����ȷ�ķ���)�������ذ�ѹ��λ
�ĸ������ǡ�ǰ����
�ǵ�ǰһ���������ᵽ�������ǵĻ�����ȷ����ǰ�ͺ�����ѹí��ĸ
����װ��֮�������������ĵ���߲ۡ��ɾ���ܵĶ���͵װ��϶�����Щ�ۡ���һ
����־�������ڿ�����ǡ�����۵��ġ�����һ����־������ͷ֧��(���ڵ�8��
�н���)�����ǵĴ���ڸɾ���ܵ�ǰ����ȷ������Զ���ʻ��ָ��ǰ��(�ҵ�APM
����ϵ���ǰ��ͷ)���Ҿ����ܾ��С�ָ�����ķ���������Ĵ�Ů����ǰ��
��!
4.2.2 ��2�������ӷ��п��������
��������ǰ�������۵ģ����п�����ֻ������һ������������ȡһ�����룬������Щ������м��㣬Ȼ���ͺ��ʵ��ź��Ա��ַ���״̬�����ڣ�����Ψһ��
Ҫ���ӵ����п��������ǵ綯����ESC(���)���۲�APM�ϱ��Ϊ����1��8����
����ע�⣬ÿ���������3����ֱ�ѷ��ڱ�ǩ����֮�µ��������š����������Ŷ�ӦESC��ÿ���ŷ����ߵ��źš���Դ�͵ء����ŵ��Ҳ�������ı��(S��+��-)����
��Ԫ�ı������ֱ�ӿ������ǡ�
������ɫ��
��ESC�Ͽ�������ɫ������ʱ����Ϊ�ŷ��ߡ��ŷ���������������������ĸ��
������Դ���źź͵��ߡ��ߵ���ɫ���ܱ仯�����鷨���ǣ���Դ�����Ǻ�ɫ�ģ���
�������ߵ���ɫ�����ַ�����Ǻ�ɫ���߰�ɫ�ź��ߣ���������ɫ���߳�ɫ
�ź��ߡ����ھ�ѧϰ��һ�����������������������в�����˶�ͷ�ۡ�
���1��2�ֱ��Ӧ���������Ϸ���ĵ綯����ȷ������ÿ���綯�����ٶȿ���
��������ESC���ŷ������߲����Ӧ��������ӡ�����ʱҪȷ�����е���(��ɫ)��
���ŷ������ߵ��·����ظ���һ���裬����������ĵ綯����������3�����Ϸ����
�綯����������4��ͼ4-6��������չʾ����һ���֡�ͼ4-6 ÿ���綯������һ��ר�õ��������ת����APM��Ԫ��APM��ͼ��ָ��ͬһ��ǰ������
Ϊ����ȷ��������Щ���£���С������ʻ��Ǻűʱ��ÿ��ESC��ͷ��Ӧ����
�����롣�����ر��֮�������в�ͷ�ļ�ˣ��ڲ�ͷ���·����ŵ��·������
һ����С�����ߴ����������ڱ�֤��������������ڣ���������´����ɾ���ܱ�
���4�����ο��е�һ��(����APM�������)��ͼ4-7�п��Կ�����һ���̵���ϸ
��Ƭ��
���ڣ���ÿ��ESC��ͷ����֮ǰ��ǵ�APM������ӡ������ȷ�������Щ��
�裬APM�ͷ�������ESC֮�佫����������ӣ�������ͼ4-8��ע�⣬���Ǿ����ܵر�֤�˽��ߵ����ࡣ
ͼ4-7 ���ǵ�ESC��������ش����ܴ����ɾ���ܱ���Ŀף����������ӵ�APM�ϵ��������(ע�⣬�ɾ���ܵĶ��屻�ƿ����Ա����㵽���õ���Ƭ������һ�����DZ����)ͼ4-8 ����ESC�����ӵ�APM�������(ע�⣬�ɾ���ܵĶ��屻�ƿ����Ա����㵽���õ���Ƭ������һ
�����DZ����)
���ʹ�õIJ���APM���п�����������ʹ���ֲ���ȷ����ȷ�ĵ綯�����˳��
APM���Ǵ����1��ʼ���������˻�ʹ�õĵ綯���������ϼ���������ֱ��������ʹ
���������1~6��������ֱ����ʹ���������1��8��
4.2.3 ��3�������������ӿ��
���ڣ����ǵ�ESC�Ѿ���APM���������Լ����������ӿ��������������Ҳ����
�ã���2����������ʱ�Ѿ���������һ����������ǵ���һ�������Բο�2.3.4�ڡ�
�ع�һ�£��㽫��4��5mm�İ�װ��˿�����ɾ�����ϵİ�װͻƬ��š������
�����Ķ�ѹí��ĸ����ͼ4-9���ܻỽ����Ļ��䡣ͼ4-9 ����������������������ӿ��������һ��
4.3 ��
���ڣ����ǵķ��п������Ѿ��ι̵ذ�װ�ڸɾ�����ϣ��������������4����
���������ӡ������������ӣ�ȷ����������Ӷ�Ӧ����ʱ���и��ˣ����Լ����Ժ�
���鷳����5�� GPS�����̺͵�ؼ����
�����У����ǽ������������˻��ϵĸ���������õ������½ڽ���ÿһ����
������ôƪ���Ե�̫�̣��������ǽ��ڱ��¼��н��������ָ�����
5.1 GPS
ʹ��GPS(��ͼ5-1)���е����������˻���ģ�ͷɻ���Ȼ�ֿ���������������
��������ʹ����ˮƽ�ﵽ��ǰ��δ�еĸ߶ȡ����ֶ���Ŀ���ʹ���˻�����߿���
Ϊ�ض��ķ������Ϳ�������ģʽ��
ͼ5-1 �����������̵�3DR uBlox GPS��Ԫ
����ģʽ�������ع�GPSʵ�ֵļ��ַ���ģʽ��
��ͣ(λ�ú߶�)
��ͣ(Loiter)��������õ�GPS���ܣ���������������ģʽֻ�谴��һ��
���أ�����ʹ�������̶����ض���λ��(γ�ȡ����Ⱥ߶�)���̶�λ��ʱ�����
��������λ�ñ��κ��������ı䣬�����Զ�У�������磬һ��������ͣģʽ�����
�����������������λ�ã������Զ��ɻء��������������£�����ķ�Χͨ��Ϊ��
��2m���߶�Ҳ������ͬ�ķ������ƣ���ֵ��Χͨ��������3m֮�ڣ���������ʹ��
GPS��������ʹ�ø��ӵĴ��������Կ��ƣ����ڲ���ѹ�ơ�
�������ϱ���
����(Return to Home��RTH)���ִ�UAV��õİ�ȫ����֮һ��ֻ��ʹ��GPS
�ſ���ʵ�ָù��ܡ�����ģʽʹ�������ܹ�ȷ�������ص�(ͨ���������ɵ�λ
��)����ijЩ���ϱ�������·��ظ�λ�á�ʧȥ������������ߵ�������RTHģʽ��
������������֮һ������������ܷ����ڷ����е�̨��غľ����߷ɳ����ߵ�㲥
��Χ֮��ʱ����Щ�˻������ǵĵ�̨�ϱ��һ��ר�õ�RTH�������ء�
RTH��ȫ��
��ȻRTH��һ���ܰ��Ĺ��ܣ���������Ҫʱ������ķ�����������Ӧ�ð�������
һ�����ϱ������ܣ������dz��ù��ܡ���Ҫ���������ŷɵ�̫Զ��λ�ã���������
������������������֮����Ҫ����RTH���ܡ�
·������
GPS����������һ��ʹ�÷�����ͨ�����·���������������������������
����п������ϴ�һ������ָ���б������߽���Щָ���Ҫ������������ִ
�С����ּ�����UAV�����ҵ���ر����ã��������ҵ�У�����һ����һ�ε��ظ���
���ķ���ģʽ������ͼ����·������ʱ��ʼ��Ҫȷ�Ϸ������ϵ�GPS�����Ƿ�����
��������������ܹ�����λ�ò���ȫ������Ӧ�þ�����ִ��·�����С�
�ҵ�GPS�Ƿ������������˽�GPS�ľ�ȷ���Ա��⸴�ӷ���������յķ���֮һ���ڵ�����������м���
��λ�á�������������һ����Ŀտ������е��ȶ�λ�ã���Ҫ�ƶ��������������
�ڵ������������Ư�ƣ�������GPS�ܵ���ij�ָ��š����·��÷��������ظ����ԡ�
��һ��ѡ��������GPS��λ�ã�Զ����������Ԫ����
����ģʽ
���������������GPS���ݵ�����ʹ�÷����Ǹ��湦�ܡ�����ģʽʹ�û�����ʹ
���ƶ�Ӧ�������˻�ʵʱ�����û�λ�������������˻������ƶ��豸���͵�λ����
�ݣ�����Ԥ��ȷ���ĸ߶Ⱥ;����ϸ����㡣���������������������ϣ���һ����ʵ
�ֵĿ����ԾͲ���˼�顪������һ�£�һ���������˻�ʼ���������ķ���ͷ��20Ӣ
�ߵĸ߶ȡ������ǣ�����ģʽӦ��С��ʹ�á���Ϊ��С��UAVû�и�֪����
����������ģʽ�ڷ�ջ���ӵ�»����¿��ܻ�����鷳�����������֦�»�ѩ����
��ֱ����������֪����һ�ж�ײ�����ǡ�
5.2 ����
��ȻGPSʹ���ǵ����˻�����˸��ߵ���������������������ܱ���ǰ���ķ�
����Ҳ�ͺ��������ˡ����̽��������������⣬��������GPS������ͬһ����Ԫ
��(����������ʾ���������)�������ܸ������˻����еķ����ܸ������˻�
��ʼʱָ��ķ����Լ������ڼ䷢���ı仯��
�����������
�Դ�����˵�������̡�һ�ʿ��ܺ����һ��ͽ�����л���ͯ�Ӿ�̽�ջ
�п������Ǹ���������Բ��������ϵ��һ���㵱Ȼ֪����˵�ľ���ָ���롣���
APM��������������������豸����ʹ��һ��С�͵��Ӵ�����(������)Ѱ�����̷�
�
���紫ͳ�����̣������Ʋ�����Χ�Ĵų���������Щ��Ϣȷ����Եķ���
ֻ��������������ʾ���ڱ����У������̡��͡������ơ��ǵȼ۵����
�Ա�APM 2.5��2.6���������õ������Դ���������յõ����ֲ�ͬ��APM���п������汾������֮
����һЩϸ�IJ�𣬵������ǹ��ĵ���Ҫ�����̡�APM 2.5ʹ���ڲ����̣���APM
2.6���Ϊͬ��GPS�����е�һ���ⲿ���̡���ʹ�ô��������Դ�APM�������Ƴ�����
���ڸ�Ϊ�ʺϵĻ�����(�Ӵ����ĽǶȿ�)����GPS�����ڡ������ӵ�е���APM
2.5����Ҫ����!�����ڲ����̣�ʹ�ø��µ��ⲿ��Ԫ�൱��
5.3 ��ؼ����
�����ǵ������У���һ����ͷ��Сȴ����Ҫ�ĸ����ǵ�ؼ����(��ijЩȦ��
��Ҳ������Դģ��)������һЩ���п�����Ĭ��������ij����ʽ�ĵ�ؼ��ܣ�����APM�����㽫����Ϊ��ѡ�Ĵ��������ӡ������ǿ�ѡ�ģ���������ǿ�ҽ�������
��������������һ�豸(��ͼ5-2)�����ṩ��ijЩ�������Ҫ������Ҫ���ݣ���
��APM������Ϊ�����������(ȡ������Ĺ�����Դ)��
ͼ5-2 ���ǵ����ߵ�ؼ�����ڷ���ʱ�ռ��dz���Ҫ���������ݵ�ؼ���ǵ�ԭ���ܼ���һ��С��·��������ص缫������ʹ������ռ�
�ؼ��ĵ�ѹ�͵�����Ϣ��������APM���ɴˣ����ǿ�������̼����ݸ���Ϣ��ɲ�ͬ
���������ڴﵽijһ��ѹʱ�Զ���������Ϊ���ϰ�ȫ��ʩ��
5.4 ��������
��������չʾ��װGPS�����̺͵�ؼ���ǵIJ��衣�Ӱ�װ�ĽǶȿ����ⲿ����
���ƺ��൱������������С�ģ���Ϊ����Щ���淸�����ܼ����Ӱ�������
���ȶ��ԺͿɿ��ԡ�
5.4.1 ��1������װGPS�豸
��װGPS�豸������������������IJ���֮һ����Ҫ����Ҫ֪����GPS
�豸������һ�����̣�����ζ������������ͱ���֮�֡�ʼ��ȷ����ǰ�ļ�ͷָ��
�ɻ�ǰ����������GPS����Դ�̧����װ֧�ܣ�һ��Ҫʹ��(��ͼ5-3)�����û
�С�����������û�а취�����������Դ�3D Robotics����Maker Shed�϶���һ
������GPS�豸(���ڲ�����)��װ�ڸ����������װ�õ�λ���Ա���ų����ţ���
ͨ������õ���������ѭ��װ֧�ܵ���װָ�ϣ���֧�̶ܹ������˻�������ܵĶ�
���������ܿ������ġ���֧����ʹ�ý϶��˫�潺(�����跨����˿�̶�)ʹ����
�̵ض�λ��ͼ5-3 3DRΪuBlox GPS�����˺ܺõ�֧��
�������ǵ����˻��������ö����37mmѹí��ĸ����һ��3D��ӡ�ĵ���������
�Լ���GPS֧��(��ͼ5-4)���㽫�ڱ������µĴֲ�ͼ�п��������Ԫ������
��ʹ�õ�GPS��Ԫ�ͺţ��������Ͽ����ҵ����ֿ�3D��ӡ֧�ܵĿ������
(http:gettingstartedwithdrones.comgps)��ͼ5-4 �����������ʹ�����DIY GPS����
5.4.2 ��2��������GPS��������APM
�����Ϊ�Լ������˻�������3DR uBlox GPS����Ӧ���Դ�����(���ܸ���)
С���£�ʹ��������ӵ�APM���Ӱ�װ����ȡ�����Dz������顣���GPS�ɴ��伸
�ֲ�ͬ���Զ���ʻϵͳ�����Կ����Դ���Ӧ�IJ�ͬ���¡���Ӧ���ҳ�������ʶΪ4λ
��5-6λ�ĵ��¡�������ȥ�ƺ��е�Ź֣�����ʵ���Ϻܼ���λ��ָ���Dz�ͷһ
�˵������������ǵ������У�ʹ��һ�����˾���4λ�����ߣ�����֮����4���ߡ���
����������(������)�ĵ��¡����ǵĵڶ�������һ����5λ����һ����6λ������
֮����5�������ӡ���û��������һ����ͷ����һ����λ������������������������
�赣�ġ��˺����ǽ�˵�����������ԭ�����ڣ�������ͼ5-5�п������ǽ�Ҫʹ��
�ĵ��¡������û���������̵ĵ��£��������߹�Ӧ�̣��ر�����ͬһ���̵깺��
APM��GPS�������!ͼ5-5 ȷ���к��ʵĵ���
ȷ���˺��ʵĵ���֮��������������GPS��Ԫ������GPSû��̫����Ҫ˵����
�ط�������һ��С�ĺ�ɫ���飬������������ΪGPS��MAG�Ķ˿ڡ���ϸ�۲����
��ע���GPS�˿���6�����룬MAG�˿���4�����롣�����Dz��������ˣ�5-6λGPS
���½�����GPS�˿ڵ�6�������ϣ������̵��¿��������ǵ�4λ�����е��κ�һ��
(��ͼ5-6)��ͼ5-6 GPS�豸һ��������˿�
MAG�˿�
�����û����ʶ����GPS�豸һ���MAG�˿��Ǵ�����(Magnetometer)����
д�������ṩ���̹��ܵĴ������ļ������ơ�
�����Ѿ������µ�һ�˲���GPS�豸�����潫��һ�˲���APM���ҵ�����GPS��
��(GPS�豸��)��5λ���£��������APM�ϵ�GPS����(������ǰ��ͷ���Ա�)��
���ڣ�����һ��4λ��ͷ����I2C�˿�(�ڲ����ɵ�·����д)�����������µ�����
ϸ����ͼ5-7��ʾ��ͼ5-7 ���ǵ�GPS������(������)���ӵ�APM
С�IJ�ͷ!
���ഫ������ͷ���ܺ���ʹ�á����Ƿdz�������һ�����룬���¾Ϳ��ܽ��������������˻�ʱ��������Ϊʲôԭ������Щ��ͷ��������С��!���ǽ���ʹ
��С��ƽͷ��˿������ؽ������������ͬʱ�����������¡���Ҫ̫������!���
��С�ģ�����Ӳ�ͷ��������������ϰ��ʹ���������֮ǰ�����������������
��Ρ�����ʱ������ƣ���һ������������һЩ�������ڵ�һ�δ���ʱӦ�ø���
С�ġ�
��β����ͷ��
��һ����ݵķ����ܹ���������ν���ͷ��������С����в���APM��Ԫ��
�����Ҳ��һ����ɫ��(�ɶ˿��ϵ����ֱ�ǩȷ��)����ֵ��ǣ����Ƿ�����
uBlox GPS��Ԫ�������෴����ɫ��������ࡣ��GPS��APM��������ʱ�ر����ԣ���
ͼ5-7��ʾ��
5.4.3 ��3������װ��ؼ����
������ǽ���װ��ؼ���ǡ���ס�����ǿ�ѡ�ĸ��������ѡ��װ����
������Ϊ��ʡ����������������������һ�������ǣ������˻������ڼ�����Щ��
Ҫ���ݺ��м�ֵ�����ǹ�������ⲿ��������
��װ������˵�ܼ����ȣ�������(���ߵ�Դ����)�Ͻ���������߲���
��ؼ���ǣ�Ȼ��6λ��ͷ����APM�ϵ�PM�˿ڡ����ڣ�����ز����ؼ���Ƕ�
���������ϵ�����Դ�����ߡ�ͼ5-8չʾ�˲�õĵ�ؼ���ǡ�
���ȣ�����ؼ���Dz��������е������������(��ͼ5-9)�������ʹ�õ�
�ؼ���ǣ�����������ͨ���������С�
��������������Ҫ�ڿ�ܵĺ�װ��ؼ����(��ͼ5-10)�����ȣ���ԭ��
�ĵ�������߲�ͷ����ɾ���ܺ�����֮��Ŀռ䣬ֱ����ܵĺ������ͷ
Ӧ���ܹ��ܺõ���ɾ���ܵײ��ļ���Ǵ��䡣һ��Ҫ��6λ���´�������ǰ��ESC
��ͷ���õ���ͬ�߿ף������ܵĵײ����������µij������Ե���������Ŀ�ꡪ��
APM�ϵ�PM�˿ڡ�
��Ϊ��ؼ���ǵ������ߺ̣ܶ��������ǿ���һ�������ߴ�������ǹ̶��ڿ�
�ܵĺ�ˣ�¶���µĵ�������ߣ�����������������(��ͼ5-11)��ͼ5-8 �������ǵĵ�ؼ���ǣ���ͨ���嵽PM�˿ڵ�6λ������APMͨ��ͼ5-9 ��ĵ�ؼ����Ӧ���к������������ͬ���͵IJ�ͷ(�����ǵ���������XT-60)ͼ5-10 ��ؼ���ǵ�λ�����ù̶��ڻ�������ϵ���
ͼ5-11 �µĵ�������߿������ӵ����е��
����ֻʣ��һ����������ˣ�����ؼ���ǽӳ���6λ���²��뱾��֮ǰ�Ѿ���
�ܹ���PM�˿ڡ������еĺ�ɫ��һ��Ҫ���Ҳ�(�˿ڱ�ǩ����ָʾ)��
5.5 ��
GPS�����̺͵�ؼ���Ǿͽ��ܵ����������棬���ǽ�ʹ�÷��п���������
ȷ��GPS��ȡ����������Ҫ���źš����ǻ����˽��ؼ���ǵ����á����ڣ�ת����
һ�½ڡ�
��6�� �����6.1 ʲô�Ƿ����
ĿǰΪֹ�������Ѿ������˷������Ķ��ֲ�ͬ��������ǻ�û��̸����������
���Ʒ���������Ƿ����������(��ͼ6-1)��������Ƿɻ��ġ�ң�������������
ʹ�÷��������������������������ݸˡ����ˡ���ť���߿��ء�����ӷ���
�������������ϵĽ��ջ������߽�������Զ���ʻ�ǻ������������
ͼ6-1 FrSky�����Taranis�����������
6.2 ��õ�Ƶ��
��ң�ط����������ڣ�ģ����������ʹ�ýϵ͵�AMƵ�Ρ���һƵ�ε��ŵ��Ǵ�
�����ܳ���������һ���ش��ȱ�㣺һ��ֻ����һ���˵�г����Ƶ�ʡ������������ڷ������������ͬ��Ƶ����ֻҪ������Ϳ��ܸ�����ķ�������
�ִ�������Ѿ�ͨ��ת�Ƶ����ߵ�2.4GHzƵ�Ρ�ʹ����Ƶ����ȷ��ͬһʱ��û
���κ��˴���ͬһƵ�Σ��˷���������⡣�������Щ�������Ѿ���ʼ��ң��Ƶ��
��ߵ�5.8GHzƵ�Ρ����������ǾͿ��Ա���2.4GHzƵ��������Ƶ����(��8���н�
��ϸ����)��֪����ʹ�õ�Ƶ�κ���Ҫ����Ϊ��Ⱥ��ӷ���ʱ�����ͻ��Ƶ�ʽ�
���ᡰ��ա������ܻ�����鷳��
>���鷨��
��Ҫ��ͼΪ5.8GHz���Ʒ��������5.8GHzģ����Ƶ�������ͬ����Ӧ�ñ���ͬ
ʱʹ��2.4GHz���Ʒ������2.4GHzģ����Ƶ���������Щ������������ͬƵ�ʣ�������ɸ��š���Ϊ�����ʹ��5.8GHz��������2.4GHz��Ƶ���������֮��ɡ�
6.3 ȫ����صIJ�ͬģʽ
����ң�ط����ʱ�˽������ģʽ����Ҫ������ʹ��ģʽ2������ģʽ�����ź�
����水ť��������ݸ��ϣ���б�ͷ�����ť�����Ҳ��ݸ��ϡ�ŷ���ձ�ͨ�õ�
ģʽ1�в��ݸ˵�������֮�෴���������Ҳ��ݸ��ϡ�
6.4 �Ա�PWM��PPM
�����֮ǰ������RC������������Ѿ�������ص�����PWM��PPM�����Ƿ�
������������(Pulse-Width Modulation��PWM)�������(Pulse-Position
Modulation��PPM)����д����Щ��ǩȷ���˽��ջ�(��ͼ6-2)�ͷ����������֮
���ͨ��Э�顣����֮�����Ҫ�����ǣ�PPM�����ּ�������PWM��ģ�⼼������Ϊ
�����ߣ��㽫ע������ڰ�װ�ϵ����ͬ�ǣ�PPM������һ������ʵ��9���ŵ�
��ͨ��(���ֻ�����ͨ��)����PWM��ÿ���ŵ���Ҫһ����(ģ��ͨ��)�����ķ���
�����Զ���ʻ�ǵ��ĵ����˽�ʹ�õ�Э�����Ҫ���������ʹ��PPM��ǿ�ҽ���ʹ��
������Ϊ��ʹ�õ��߽��٣���װ���̽���÷dz���ࡣ���ǣ�����������Ӳ����֧
��PPMЭ�飬���Ա�������ֲ��Եõ���һ���IJο����ڱ����дʱ��APM����Ҫ��
���汾����֧�����ֻ�ͨ��Э�顣��������֪����Щ������Ա�Ѿ�������֧������
Э��Ķ��ƹ̼������Dz��������ְ�װ���Զ���������Ա��δ�������ԵĹ̼������ʹ�ùٷ��汾���ڶ����ڻ����ɵö�!
ͼ6-2 Spektrum��6ͨ�����ջ�
>���ֻ�Э�����������
�����������Ѿ��������Լ������ֻ�����ͨ��ר���汾��������Ϊ����������
�磬˫Ҷ(Futaba)��˾����汾ΪSBus��
6.5 ��������
�ⲿ��������Ҫ���²��ϣ�
��1Ӣ��˫�潺��
������
�����Թ��ŷ���
6.5.1 ��1����ȷ������װRC���ջ��Ĵ��˼·�ܼ������ջ���װ�ڻ�������ϣ�Ȼ���ڽ��ջ�
���Զ���ʻ��֮������һϵ�е��¡���ΪPWM��PPM֮��IJ���Լ������̱���
��ͬ�����ջ����Զ���ʻ��֮���м�ʮ�ֲ�ͬ�����߷�����Ȼ���������ڴ�ֻ����
һ�֣���Spektrum�����ջ�(��ͼ6-3)��PWM���ӡ�������������Dz�ͬ�IJ�
Ʒ��������Զ���ʻ�Ǻͷ�������û��ֲ���ȷ����ȷ������˳��
��һ���ǡ�ǰ����
һ��Ҫ����Щ�����װ����ȷ��λ���ϡ��������ʶ���ܵ�ǰ������Ϊǰ��
��һ�����ȱ�ڣ���������ͷ�ĸ���֧�ܡ���һ����ʾ�ǣ�����������ĺ���
��������ǰ����
ͼ6-3 ���ǵ�Spektrum���ջ��ڹ���̨�ϲ���APM�������
6.5.2 ��2������װ���ջ�
ʹ��һ����˫�潺���ڻ����ϵ�ij��λ�ð�װ���ջ�(��ͼ6-4)�����ǽ���
������ڻ�����ǰ������Ϊ�����ں�����������������ӵ�APM��������ӡ�
����ͨ�ų�ͨ������������õ������ǡ�С������������Ϊ���ջ���һ�������Զ���ʻ��
��λ�ã��������Ա��ֵ����ϵĿ����������������ߡ���ס����Щ����(��̼��
ά)���ܻ�������ߵ�Ĵ��䡣�����ڽ��ջ��͵��������֮��Ļ������־�����
����һ�������⡣������ջ��нϳ������ߣ������ܽ����������֮��ϵ͵�λ
�ã��ṩ��õĽ������ܡ�
ͼ6-4 Spektrum���ջ���װ�ڻ���ǰ��
6.5.3 ��3������ͨ���ջ�
��5���̵Ĺ��Թ��ŷ��߰���ͼ6-5���ӡ�������1���ӵ����ջ��ķ���ͨ������
��2���ӵ�����ͨ��������3���ӵ�����ͨ��������4���ӵ�ƫ��ͨ�����������5
���ӵ�Aux 1�����ǽ������ͨ���л���ͬ�ķ���ģʽ��ͼ6-5 APM PWM����ͼ
��7�� ң���̨
7.1 �������������
��ĿǰΪֹ�����Ѿ�ע�����RC�������һ���dz���Ҫ�����������ֻ��һ
��������ͨ�š����ӷ��������������Ϊ�˷��ʷ������Ļ������ݣ����DZ���ʹ
��һ��ר�õ�˫���̨����ң����·��
ѡ����ʵ�Ƶ��
ң���̨���������ֱ�Ƶ���¹�����������������ͨ��ʹ��915 MHzƵ�Σ���
ŷ����ƫ��433 MHzƵ�Ρ���Щ����ȷ����Ϊ�˱�����г������������豸�ĸ�
�š��ڴ����Ƶ���Ϲ�����ijЩ�����ǷǷ��ġ�һ��Ҫ�������ڹ��ҵķ��ɣ��˽�
Ӧ��ʹ�õı���
����˼�壬ң����·�ӷ�������ȡ��һϵ�м���ֵ�����䷢�ص��棬���ڵ��������������ʾ(��ͼ7-1)�����⣬����(��·���㡢������������ͷ�������
��)���Դ�ͬһ��������������ϴ�����������
ͼ7-1 ��̨��ƽ����Լ���ң���̨��һ����ѵ�Ӧ�ã��Ϳ�����Ϊһ������վ
�ڵ����Ͼ��ܷ���������Ϣ����һ��������ơ����ܹ���������ʧ��֮ǰ��
�����⡣�������������Ҫ�����ݵ����ά�ȡ����ȡ��߶ȡ���������̬����ǰ��
�ص�ѹ�������������ٶȺͷ���ʱ���ȡ�������ڵ�������������ֲ����ҵ�ͨ
�����ݵ������б���
7.2 ��������
�ⲿ��������Ҫ���²��ϣ�
��1Ӣ��˫�潺
��1Ӣ��ά���Ρ����ߴ�
7.2.1 ��1������װ����վ��̨
ң���̨��ʵ���ϰ���������ͬ�ĵ�̨������һ����װ�ڷ������ϣ���һ��
����ĵ��������������(��ͼ7-2)�������̨���Զ��ַ�ʽ��װ�����ǣ�����һ
����ά���ν���̶�������������ƽ����Ի��߱ʼDZ����Ա�����ʹ�����ڲ�ʹ
�õ����������ʱ�����Ƴ���̨��
ͼ7-2 ʹ��ʱ��ά���ν�ң���̨�̶���ƽ����Ա��棬������ʱ�������ɲ��
����վ����
��ΪAPM��һ����Դƽ̨����������õĵ���վ��������������ϲ�����ǰ�ƽ
���ϵ�Tower��Windows PC�ϵ�Mission Planner�������ʹ�õ���Mac�ʼDZ�������
����APM Planner������Mission Planner�dz����ƣ����п�ƽ̨�汾��������
Windows��OS X��Linux��7.2.2 ��2��������װ��������̨
���ڷ�������̨�����ǽ���ʹ��˫�潺������̨�̶��ڻ��������(��ͼ7-
3)������������Լ��0.5Ӣ���˫�潺�����ڵ�̨�Խǵ������ϡ����ڰ�װλ����
һ��������ԣ��������ǽ��齫��̨���ڻ����ĺ�벿�֡��⽫ʹң���̨������
��Զ��RC���ջ���
ͼ7-3 ����ʹ��˫�潺����̨�̶��ڻ�����
���ڻ�����Ҫ�̶���̨������ϣ���ý�������̶���������Ȼ��ҪΪ��̨��
�ߣ����ڰ�װ֮ǰ���н����öࡣ
��һ���ǡ��ϡ���һ��Ҫ����Щ�����װ����ȷ��λ���ϡ��������ȷ�������ġ�ǰ��������Ϊ
����Ϊ���������֧��Ԥ���Ĵ��Ϳ��ڡ���һ����־���������ܵĺ�(������
��ǰ)�۵���
7.2.3 ��3������ͨ��̨
Ϊ�µ�ң���̨����ʮ�ּ�(��ͼ7-4)���ҵ���̨�Դ��ĺ��ʵ��£������
���������̨�ĺ�벿�֡�����������5�������ĵ���(4�����ߺ�1������)������
���˵IJ�ͷ����6���߲ۣ�����1�����ա����dz�������������µ���һ�˽�������
����ʻ���ϵ�ң��˿ڡ�
ͼ7-4 ����ڰ�װ�����֮ǰ���У�ң���̨�����Ӿͻ����ɵö�
7.2.4 ��4������װ��������̨
���ڣ����Ѿ����Ӻõ�̨�����Լ������䰲װ�ڻ�����(��ͼ7-5)��Ӧ����˫�潺����̶���λ����̨һ��Ҫ������֮�⣬ʹ�����ܹ�����Ҫʱ������ת������Ҳ��Ҫ���̫�࣬�������������
�㽫��ע����²�ͷ�����Сͻ����ʹ����ֻ�ܴ�һ��������롣������
�������֮ǰ�ҵ���Щͻ��ȷ�Ϸ���(��ͼ7-6)��
ͼ7-5 ��װ�õ�̨�����ղ�Ʒͼ7-6 ÿ����ͷ���������Ƭʹ��ֻ�ܴ���ȷ�ķ������
��8�� ����ͷ��FPV�豸
������ӰĿǰ�����˻�����ѡ��;���������˻�����ͷ��������Ե������顣
��������ͷ���鼮���Ժ��Ǹ��ָ��������ã��Ӽ�ֵ5����Ԫ�Ĵ��ͺ�����ӰԺװ��
��С���˶�����ͷ��������������������ʾ������ʹ�õġ����´��Խ��̶ܹ�֧��
����ͷ�Ļ���֪ʶ����������ͷ����ʵ��ֱ����������ͨ�����źŷ���С����ʾ��
������Ƶ�۾��ϡ�
8.1 ���е����˻�����ͷ
��������һ�����İ����Ϊ���˻�ѡ����ʵ�����ͷ������һ�������ѵ���
����ѡ���κ����˻���������ͷʱ����������Ҫע������5�����棺
�����ͳߴ�
������������������һ��������ʼ��������Ҫ���ǵ����ء�������������
�����⡣
Զ�̴���
������Ƶʱ������Լ��ڵ���������Ƶ¼�ƣ�����ʱֹͣ�����ǣ����ھ�̬��Ƭ��˵������һЩ����̬��Ƭ��Ҫ�����������ڼ����������ͨ���Ľ����
����������ͷ�м���һ����ʱ�ع���Ƽơ�����豸�����Ͼ���һ����ʱ����ÿ��X
��ʹ����������һ�Ρ��������н��������������ʵ�ʰ�������ͷ���Ű�ť�Ļ�
е�ŷ��ۣ���������ͨ������RC��������Ƶĺ���ң������
ֱ����
���˻�����ͷ����һ������Ĺؼ�������ͨ������ͷ�ϵ�ij������˿����ֱ
����������������˿ڿ���������߷ֱ��ʶ�ý��ӿ�(High-Definition
Multimedia Interface��HDMI)�����������ͨ����ͬ��ͷ���͵�ģ���źŶ�
�ڡ��������Ƿ����ţ�ģ���ź��ڴ�ʱ������ѡ�ķ�����ԭ�������ǵ���Ƶ��
���ֻ�ܽ���ģ���źš�
����ͷ�ֱ���
�ҵ���������Ҫ���һЩ����ͷ֮����Ҫ��������ķֱ����ˡ�����Ƶ��
�ԣ��ֱ��ʲ������⣬���ڣ���ʹС���˶�����ͷҲ���Դﵽ4000�ĸ߷ֱ��ʡ���
�ǣ���̬��Ƭ����һ���¡�һ��Ҫ��顰�������ء���ƣ�ȷ�������������
�ɱ�
������4��������СDZ�ں�ѡ����ͷ�ķ�Χ֮��Ӧ�ÿ��Ǽ۸��ˡ���ͬ���
������ͷ�и��Եļ۸����䣬����һ��Ҫ��Щ�о���ȷ���õ������ļ۸�С�͵�
Կ������ͷ����100��Ԫ���������˶�����ͷ�۸���100��500��Ԫ��С��M43��
���ļ۸���300��1000��Ԫ�����뵥������ļ۸�����500��Ԫ���ϡ�
8.1.1 M43���
2002�꣬43ȫ���뻯���ű�ϵͳ�Ƴ�����ϵͳ����������ͬ�����ϵ����
�����;�ͷ(��ͼ8-1)����һ������Դ��ͼ�����ij����ȣ��ô�������ȫ��
DSLRС30%��40%�������ԱȽ����͵ġ�ɵ�ϡ������9�����ҡ�ͼ8-1 �dz����е�M 43���Lumix GH4���䱸���ְ�˹17mm��Ǿ�ͷ
43ϵͳ��UAV������������Եĺô��ǽ�С������ʹ��С�����������ͷ��Ϊ
���ܡ���Ӧ�أ���С�������ľ�ͷʹ�����п��ܴӸ��ӽ�ֱ�ǵķ�������������
����ֱ����������˾����������Ƭ�ܽ��ķ��ա��ʹ����ͼ����ĽǸ�����
��������֮������ķֱ��ʸ��ߡ������ϣ�ʹ��43�������������Խ�С������ͷ
�غɻ�ø���������Ƭ��
�������ǵ�����ʾ�������ǽ���ʹ��Mobius�˶�����ͷ����808Կ������
ͷ��
8.1.2 Mobius�˶�����ͷ
�������ǵ�С������ֱ���������ǽ���ʹ��Mobius�˶�����ͷ����ͬ��������������ͷ(��ͼ8-2)�����������ͺŵ�����ͷ�������ᣬ����ʹ�ã����ʺ��ڡ�С
�������ijߴ磬���ļ����ؼ��������£�
��ռ�ÿռ�С��61mm(��)��35mm(��)��18mm(��)��
���������Լ38g(ȡ���ڹ�����ͺ�)��
�����ÿɳ��﮾ۺ����أ�����Ҫ���ӵ��������ĵ�Դϵͳ��
��ȫ������Ƶ��1080p30 FPS��������������Ƶ720p60FPS��
����̬��Ƭ��ʱ�ع���Ƽƣ��ֱ������Ϊ2304��1536������Ҫ�ⲿ�������
������ÿX���Ӵ���һ�Ρ�
��������Ƶʱ����ʵʱ���ͣ��dz��ʺϴ�����Ƶ���ջ���
ͼ8-2 �˶�����ͷ�о٣�GoPro Hero 3��Mobius��ǡ�Mobius����ͷ��808Կ������ͷ
8.2 ����ֱ������FPV
���˻���һ������Ĺ������ܹ�ʵʱ�����������������������������ͨ������һ̨��Ƶ�������ʵ�ֵġ���̨�����(VTx����ͼ8-3)������ͷȡ��ֱ������ͨ���ض�Ƶ�η�������Ľ��ջ���Ȼ���ջ����ӵ���ʾ������Ƶ�۾�����ʾ
ֱ����Ƶ��
ͼ8-3 �䱸��ѡ��ޣҶ���ߺ�ֱ����������5.8GHz��Ƶ�����
��ͳ�ϣ�����ͨ��ͨ��5.8 GHzģ����Ƶ��������ջ����С����ǣ����һЩ
�����̿�ʼʹ��5.8 GHz����2.4 GHz WiFi���磬���ƶ��豸����ʾ��Ƶ��������
��Ƶ�����ܹ���ͬ������Ȼ��һ̨����������źŷ��䵽���湩���ջ����գ�Ȼ����ij����ʾ������ʾ��
�����ǵ��������䱸ʲô�豸��
��Ϊ����������������ʽ��С���������������豸�����ܵ͡�������Ѿ�
��װ�˻��ص�APM��GPS������ͷ����ֻ���ٰ�װһ�ָ����豸�ˡ�����֮�������
��FPV���������ң���̨��ѡ�������Dz����齫���߶���װ�����˻��ϡ�����
�Ѿ���ǰ�����������ң���̨�Ĺ��̣���˽�����˳����һ����·��������һ��
�ع�FPV����Ϣ�����ǣ�������װ��Ƶ�����������FPV�豸����Ȥ�����Է���
���ǹ�����һ�������ҳ(http:gettingstartedwithdrones.comfpv)��
8.3 ��������
�ⲿ��������Ҫ���²��ϣ�
��1Ӣ��˫�潺
������
��12Ӣ���������������
8.3.1 ��1�����̶�����ͷ֧��
��2������������������С��������������һ��С�ĸ���壬��������ڹ̶�С
���˶�����ͷ�����������ֱ�����ϰ�װMobius����ͷ����Ӧ���Դ�һ�����֧��
(��ͼ8-4)�����ǵĵ�һ���ǽ��������ͷ֧�̶ܹ�������ͷ������ϡ���ֻ��Ҫ
���������ԼΪ0.5Ӣ�糤��˫�潺����������ڿ���ĵײ������ڣ��ӽ�����˺
ȥ�����㣬�����֧�̶ܹ��ڸ������(��ͼ8-5)��ͼ8-4 Mobius����ͷ�Ŀ��֧��ͼ8-5 �̶��������֮��Ŀ��֧��
ȷ��ƽֱ!
˫�潺���Ѵ�С�����ϲ���(��������ͷ֧��)��˺�¡�����ʱ�䣬ȷ����
��ͷ֧�ܺܺõض��룬�ڸ�����ϱ���ƽֱ�����û��������һ�㣬��˫�潺˺��
����ճ���Ǻ�ʹ������飬û����ϣ����������ͷ�ڻ���������б��!
8.3.2 ��2�����̶������
���֮ǰ��û�������һ�����������ǽ������̶��ڻ����ϵ�������֧��
�ϵĺ�ʱ������ݵķ�����ʹ��һ�������������߽�����֧��������װ�ף���ͼ8-6��ʾ����4�������ظ���һ���衣����Ե�����ȷ�ķ�����
ȷ�������֧�������ȷ�ķ���֧����3����ߣ���һ�˿����Ա�����ͷ��
�롣ȷ�����Ŷ�ָ���������ǰ����
ͼ8-6 �������̶���������֧����
8.3.3 ��3������������ͷ�ڿ��֧����
���ڣ����ǵ�����ͷ���֧���Ѿ��̶��ڸ�����ϡ��������Ҳ�Ѿ���װ����
������֧���ϡ���ʣ�µľ��ǽ�����ͷ��������ͷ֧��(��ͼ8-7)��ȷ������ͷ
�ľ�ͷָ������ͷ֧���ⲿ��Ȼ������ͷ�в���С���۶�����ͷ֧�ܲ�����
��5��ͻƬ����ЩͻƬ���ڹ̶�������֧���ڵ�����ͷ�����ڣ�����ؽ�����ͷ����
֧�ܣ�ͬʱ��ס֧�ܺ��ṩ�����֧�š�ͼ8-7 ���ڿ������ͷ֧���Աߵ�Mobius����ͷ
��9�� ArduPilot Mega����
���ڣ������Ѿ����ʵ�������Ĵ֣���ʱ�����Mission Planner����ʼ
�����Զ���ʻ���ˡ�һ���������һ���̣�����ֻҪ����һЩ��β��������������
���Է�����!
���µĽṹ������������в�ͬ������ֱ�ӽ����������裬Ȼ���о�Mission
PlannerӦ�ó�������ಿ�֡�
9.1 ��������
�ⲿ��������Ҫ���²��ϣ���һ̨����Windows 7���߸���ϵͳ�ıʼDZ�����(���ֻ��Mac�����Խ���һ
��Boot Camp������װWindows)
�����°汾��Mission PlannerӦ�ó���
��Micro-B��USB 1.12.0����
9.1.1 ��1�������¹̼�
����Ӧ�����ĵ�һ������ȷ���������°汾�Ĺ̼�������ArduPilot
Mega(APM)�����ʱ�䣬�����������ͬ�İ汾����Ҫ���Ž�������ʹ�����
Ʒ�Դ��İ汾����ɸ��£���������ȷ����������ȷ�ĵ�·�ϣ�
a.�����ʼDZ����Ե�Դ��Mission Planner��
b.��USB���²���APM����һ�����ӱʼDZ���
c.����Mission Planner��Initial Setup(��ʼ����)ѡ�����������
���е�Install Firmware(��װ�̼�)��
d.����Ļ�м��ͼ�ΰ�ťѡ��ArduCopter vX.X Quad(����vX.X����İ汾
��)�̼�����(��ͼ9-1)��ͼ9-1 ѡ����Ҫ���µĹ̼�����(���ǵ���������ArduCopter Quad)
e.ϵͳ��Ҫ����ȷ����Ҫ���µĹ̼�������Yes����(��ͼ9-2)��
f.Mission Planner���ҵ����������APM�̼������°汾�����������¡���
��OK����(��ͼ9-3)��
g.�̼����¿�ʼ(��ͼ9-4)��
h.�̼��ϴ�֮����Ҫ���������֤(��ͼ9-5)��
i.�ڸ������֮��Mission Planner�������棬���¿�����ҪһЩ���Ӳ���
(��ͼ9-6)��ͼ9-2 ����YESȷ������Ҫ����ͼ9-3 Mission Planner�Զ��ҵ����APM֧�ֵ����¹̼��汾ͼ9-4 �̼��ϴ���ʼͼ9-5 �̼���֤������ͼ9-6 ���������!����OK����
��������
�ڸ������֮ǰ��Ҫ�Ͽ�USB���¡�ע����������˽��ʱ��ɸ����Ǻ���Ҫ
�ģ����Բ�Ҫ�����һ���̡�
�����ʺ�COM�˿�
ÿ����Mission Planner����APMʱ��������ָ��ͨ�ŵIJ����ʡ���һָ�궨��
������ͨ�ŵ��ٶ�(λ��)��ͨ�õľ��鷨���Ƕ�ͨ��USB���µ�ͨ��ʹ��
115200����ң���̨ͨ��ʹ��57600������Ӧ�ó�����ܻ��Զ����ͨ�����Ͳ���
���������˽���һϸ����Ȼ����Ҫ����ΪMission PlannerҪ��������һ��ֵ��
���⣬�����֪��APM��ʼDZ�����ͨ��ʹ����һ��COM�˿ڡ�Mission Planner
�ܺܺõط������APM��Ĭ��ѡ����ȷ��COM�˿ڣ���������Ҫһ�����š��������
��Mission Planner֮ǰ����APM�������һ����Ȼ��Ч���鿴PC���ã��ҳ�����
���ŵ�COM�˿ڣ���Ӧ���ܿ���APM�ԡ�Arduino Mega���������г����������COM�˿��Ա������
9.1.2 ��2�������Ӳ���ɱ�Ҫ������
���ڣ����Ѿ��ϴ��˹̼��������Ѿ�����һ���ܺõ���㡣������������ɱ�
Ҫ�����ã�ʹ��ֻ��С�����÷������!
ʵ���ϣ������һ�������ַ�ʽ����һ����ʹ����һ����ʹ�õ�Install
Firmware��ť���·���Wizard(��)���ڶ��ַ�ʽ���˹������������ڱ����н�
�����˹��������������ַ�ʽ��������һ���ġ���ǿ�ƽ����в���һ����ɣ���
�˹���������ֻ�����Ҫ���IJ��衣ÿ�������µķ�����ʱ�����Ƕ�Ӧ���������
���裬����δ�������ֻ��Ҫ���²���һ��������(��GPS����IMUУ)���ɣ���
�Ǵ����ͷ��ʼ���⡣
�����κ�����֮ǰ�����Ƕ����뽫APM���ӵ�Mission Planner������Ҫѡ��
COM�˿ںͲ����ʣ�Ȼ��Ӧ�����Ͻǵ�Connect(����)��ť������֮�����
ע������л����һ���µIJ˵�ѡ�����Mandatory Hardware(�ر�Ӳ��)
��Optional Hardware(��ѡӲ��)��
����2.1�����û�������
����Mandatory Hardware�����������Ŀ�е�Frame type��ť����ѡ��X
copter���(��ͼ9-7)��ͼ9-7 ѡ���������
����Ĭ������
�㽫��ע����ڻ���ѡ����Ա���һ������ΪDefault Settings(Ĭ����
��)������ʽ�˵����ڱ��������ڼ���Ժ��Ը���Ŀ������ijЩ�ֳ����˻��Ŀ��
��ʽ�����磬�����ӵ��һ��3D Robotics Iris+����ֱ�������ͻ�������˵��з�
����Ը��ͺŵ����á��ź����ǣ�Mission Plannerû���Դ������ͺŵ��������ã��������DZ����˹����á�û��ϵ�����������ѧ������!
�Ա�X��+
ѡ��X��������ʱ�������ע���һЩѡ��������X��+(����������ʱ
��Ϊ��I��)����ָ���ǻ��������ã��Լ���APM���õĹ�ϵ��������������һ��
�ᴩAPM�����쵽����ǰ����ֱ�ߣ�X����������ֱ��ָ�������綯��֮�䣬��+����
��ֱ��ָ��ijһ���綯����ͼ9-8˵�������������á�ͼ9-8 ���ֲ�ͬ����(X��+)������ֱ����
����2.2��У���ټ�
��һ���Ӳ�����У���ǵļ��ټơ���ΪAPM������һ����������
�⡰�ϡ������¡��ȷ���Mission PlannerҪ���㽫���˻��Ƶ���ͬ��λ�ã�һ
��Ҫ��ˮƽ�Ĺ���ƽ������һ��ɾ��������Ը����������ķ����ھ�����ˮƽ
�������ڽ������������Ҫ�������������������ʹ������ˮƽ��ȷ��ѡ��
�������Ƿ�ˮƽ�����dz���ʹ��С�ĵ��ӹ���Ϊ���ƫ��ˮƽ��������ʹ�õ�Ƭ
������
�������˵��е�Accel Calibration(���ټ�У)��ť(��ͼ9-9)����
������Ӧ�ô����з���һ�����ΪCalibrate Accel�İ�ť�������ð�ť������
Mission Planner��ָ�����Ҫ���㽫���˻����ڶ����ͬλ�ã�Ȼ��������
��������һ���˹�����ɣ��㽫����Уͨ����ʧ�ܵ�֪ͨ��Ҫ����ʹ�õ�λ��
�ǣ�ͼ9-9 У���ټ�
ˮƽ
��������������ʱ���ֵ�����λ�á�
����
�������������ɻ�������λ�õ��š�
��ͷ����
��������ǰ��ֱָ���棬β�����ϡ�
��ͷ����
��β���£���ͷ���ϡ�
�������������£��Ҳ����ϡ�
��
�������Ҳ����£�������ϡ�
����2.3����������
�������˵��е�Compass(����)��ť��������Ӧ�ô�������ʾ����������
Ļ(��ͼ9-10)�����������Ƿdz���Ҫ�Ĺ��̣�����3���������裺
ͼ9-10 ��������
a.�����Զ���ƫ�ǣ��ҵ���ѡ����Ӧ�ô��ڵ�Enable(����)��Auto Dec
Declination(�Զ���ƫ��)��ѡ�������������APMʹ���Լ���GPS�ҵ�������
��λ�ã�Ȼ��Ը�λ����������̡������ÿ����������͵شű���֮���ƫ�
b.ѡ���������ͺͷ�������Ӧ�ô��ڵ�Orientation(����)����ѡ��APM
with External Compass(���ⲿ���̵�APM)ѡ��⽫�Ѹ��ֶεײ����ı���
ΪROTATION_ROLL_180������Ϣ������APM����ָ��ķ���Ҳ��������˿�ʼ�����Ļ���
c.ִ��У�����ڣ������Ѿ�ȷ�������̵ķ����Զ������У��(��ͼ
9-11)��������Ӧ�ô��ڵײ���Live Calibration(ʵʱУ)��ť������
Mission Planner��ָ����С���һ��������Ҫ���Ѽ����ӣ�Ӧ�ó���Ҫ��������
������ת����������ʹ�������һ�����������л�ȡһЩ�����㡣��һ��ʱ�䲢��
��ָ����У�ֱ��Mission Planner֪ͨУͨ���������ΪijЩ��ֵ�ԭ��У
ʧ�ܣ���Ҫ���ġ�ֻ��Ҫ�ٴν���У��ȷ���������̵��������ƶ����ɡ�
ͼ9-11 ����У
����2.4����̨У
�������ǵ�̨У��APM�Ʒ����Ϊ��̨�����Դ����ڿ�ʼ���ǽ����������ﻥ
��ʹ�á��������˵��е�Radio Calibration(��̨У)��ť(��ͼ9-12)��
�⽫����Ӧ�ô�������ʾУҳ�档��������˼·����Mission Planner����
�ĵ�̨ͨ�ţ��ҳ�ÿ��ͨ���ķ�Χ����У�ڼ䣬ϵͳ��Ҫ���㽫���ݸˡ����غ�
��ťת����С��������ã��Ա�Ӧ�ó����˽�ÿ��ͨ���ķ�Χ��һ������ɫ������
ͼ����ʾ��̨��ÿ��ͨ�������ǽ����ŵ�̨�Ŀ��ƶ��ƶ�(��ͼ9-13)��a.�������Դ(����㻹û����ô���Ļ�)��
b.������Ӧ�ô�����Radio 8����ͼ����ɫ��Calibrate Radio(У��̨)
��ť��
c.����ָ����е�̨�����豸����������С���ã������㽫Ҫʹ�õ�����
�����豸���緢����ϵIJ��ݸˡ����ء���ť�ͻ���(������ӵ�еĵ�̨����)��
�㽫ע���ÿ��ͨ��������ͼ�Ͻ�����һ��ϸ���ߣ���ʾ����С�C������á�
d.���֮����Click when Done(���ʱ����)��ť(��У������ͬһ
����ť��ֻ�DZ�ǩ��ͬ)��
ͼ9-12 ��̨У��ʼ֮ǰ
���У֮����ʾһ��С�ĵ������ڣ��������̨ÿ��ͨ������С�C���ֵ
(��ͼ9-14)������OK�뿪����Ļ��������һ����ͼ9-13 ע���ʾÿ��ͨ����С�C���ֵ�ĺ�ɫ��
ͼ9-14 ף����!��̨�Ѿ�У����2.5�����÷���ģʽ
���Ѿ�У�˵�̨�������������ڷ���ģʽ������������ȷ�ķ���ģʽ��Ҫ��
��������̣����ȵ������˵��е�Flight Modes(����ģʽ)��ť���⽫����Ӧ
�ô�����ʾ����ģʽ��ָ����ͼ�����ǽ�ʹ�������ͼ������ͣ���ȶ�����ģʽ��
�����ĵ�̨��һ����λ����(�е�ֻ������λ��)������ѡ��һ������ķ���ģ
ʽ����Auto(·������)����RTH(����)��
a.�ڿ�����̨��Դ������£��л�����ģʽ���صIJ�ͬλ�ã�ͬʱ�۲�
Mission Planner���㽫ע������ص�ÿ��λ�ý���ʹӦ�ó����в�ͬ�ķ���ģ
ʽ�˵������ɫ������ÿ������λ�á���������ģʽ�˵���
b.ʹ��ÿ������ģʽ�������˵���ָ��ϣ���øÿ���λ�ÿ�����ģʽ�����磬�������λ��1������Ӧ�ó����е�ģʽ�˵�2��������������˵��и��ģ�����ͣ
����ģʽָ�����ÿ���λ��(��ͼ9-15)�����ڣ��л�������λ��2����ģʽ�˵�ָ
���ȶ�ģʽ(��ͼ9-16��ͼ9-17)��
ͼ9-15 ����λ��1��������ģʽ�˵�2ͼ9-16 ����λ��2��������ģʽ�˵�4ͼ9-17 ʹ�������˵����ȶ�����ģʽָ����ģʽ�˵�2
����2.6�����ù��ϰ�ȫ
���ǵı�Ҫ���ÿ�Ҫ����ˡ����һ�����ǹ��ϰ�ȫ���á��������ʹ������
�������ڷ�������ij������ʧЧʱ��ȡ�Ĵ�ʩ�����統ʧȥ���ߵ����ӻ��ߵ�ص�
���ڷ���ʱ�½���ijһˮƽʱ��ȡ�Ĵ�ʩ��Ҫ��ʼ��һ���裬���������˵��е�
��FailSafe(���ϰ�ȫ)��ť��
a.�ҵ���Ӧ�ò˵��Ҳ��Battery(���)��Low Battery(��ص͵�
ѹ)����Ϊ10.4��Reserved MAH����Ϊ0����ʹ����ֻ��ص�ѹ�������ü��ӵ��
��������ֻ�����κ�ʱ��ʹ����ͬ��С�ĵ�أ���ȷ��֪���������ϰ�ȫ��ʩ
֮ǰ��Ҫ���١�ʣ��������ʱ���Ż�����MAH����ʹ�ó���һ�ֵ�ش�Сʱ�������
ѡ����ܻᵼ�¹��紥�����ϰ�ȫ��
b.���ڣ�������Ҫ���÷�����ع��ϰ�ȫ�¼�ʱ��ȡ�Ĵ�ʩ����ͬһ��
Battery�ֶε������˵���ѡ������һ��(��ͼ9-18)��
�����˵��е�ѡ���У�
��Disabled(����)
��Land(��½)
��RTH(����)ͼ9-18 ��ع��ϰ�ȫѡ��
c.���·���Radio(��̨)���У��������˵���ѡ������IJ���(��ͼ9-
19)���⽫����APM�������ߵ���ϵ�ж�һ��ʱ��(��APM����)ʱӦ�ò�ȡʲô��
ʩ�����ڣ���FS PWM�ı�������е�ֵ����Ϊ975���⽫����APM��RTH�¼��ڼ��
PWMֵ����̨���ϰ�ȫ��ʩΪ��
��Disabled(����)
��Enabled always RTH(���ã����Ƿ���)
��Enabled Continue with Mission in Auto Mode(���ã������Զ�ģʽ�е�
����)
��Enabled always Land(���ã�������½)ͼ9-19 ��̨���ϰ�ȫѡ��
9.1.3 ��3�������ӿ�ѡӲ��
���Ѿ�����˱�ҪӲ��������!������ʱ��ת���ѡӲ���ˡ�APM�������Զ���
ʻ�������������ѡӲ�������Ǹ�ϵͳ�����ڶ�ҵ�������ߺͷ����ѵ���������֮
һ�����������Ӳ����ң���̨�͵�ؼ���ǣ���������ѡ��Ҳ�ܶ࣬��������
�����������ټ����ǡ���ѧ������������Ļ��ʾ��(OSD)���������̨(�����ŷ�
����)�����߸�����������ģ�顣��Щ����Ӳ���дֳ����˱���ķ�Χ��ʵ��
�ϣ�������Щѡ��Ϳ��Զ�������!��������ⲽ���У����ǽ��������������е�
ѡ��ң���̨�͵�ؼ����ǡ������ѡ��װ��Щ�����������������3��
����3.1��3DR��̨(ң��)
�ڵ�7���У�����ΪAPM��װ��ң���̨����Щ��̨�dzɶԳ����ģ�����гΪͬ
һƵ��(���Net ID)�������ϣ����˽�ͨ��Щ��̨�ĵ�Դ���������Ӱ�ť֮�⣬�㲻��Ҫ���κ����顣���ǣ�֪����̨����������ڱ�Ҫʱ��θ��ģ��Ǻܺõ�
����(��ͼ9-20)�����������һ��ŷ�ֱ�����������Լ���Net ID�Ա�������ţ�Ҳ��һ�������⡣
ͼ9-20 ����ң���̨����
�������²��裬����̨�ͨ���Ƿ����Ԥ�ڣ�
a.ȷ���Ƿ��Ѿ�ͨ��USB���ӵ�Mission Planner������Ѿ����ӣ��Ͽ�����
�����¡�
b.��ͨ������Ͱ�װң���̨�����˻��ĵ�Դ��
c.������ң���̨���ӵ��ʼDZ�����Mission Planner��
d.�ڱ�Ҫʱ����COM�˿ڣ�������������Ϊ57600��Ȼ��Connect��
�����������Net ID���ã��Ա��ں�������һ�����ʱ����ɸ��ţ�ֻ��Ҫ
ʹ�������˵��ҵ�һ���µ�Ƶ����һ��Ҫ������(Local������)��Զ��
(Remote������)��̨����Ϊͬһ��ID��Ȼ����Ӧ�ô��ڶ�������ɫSave
Settings(��������)��ť������3.2����ؼ����
������ϲ������һ����ѡӲ���ǵ�ؼ���ǡ�����һ�ּ��豸�����ǿ���
�ṩ�dz��м�ֵ����Ϣ�������ڵ�ع��ϵ�ʱ��������ķ������������5��������
�ܵģ���ؼ���ǰ�װ�����������͵��֮�䡣��ʹ��һ��СоƬ��APMͨ�ţ���
����صĵ�����ʣ��������Mission Planner�����ҳ�����������������ؼ��
�ǵ����á�ѡ�����˵��е�Battery Monitor(��ؼ����)�����Դ������
Ļ������Կ���3�����ã�
�����
������ؼ���ǽ���ص����ݡ�ѡ����Disabled(����)��Battery
Volts(��ص�ѹ)��Voltage and Current(��ѹ������)�����ǽ�����ӵ�е�
�ؼ����ʱʹ��Voltage and Currentѡ��(��ͼ9-21)����ѡ���ܹ��ṩ������
Ϣ�������Ǽ��ܺõ����顣
������
����˵�����ѡ��ʹ�õ�ؼ���ǵĴ��������͡�������Ǵ�Maker Shed����
������Ӧ��ʹ��3DR Power Moduleѡ�������������ط�����ļ���ǣ�����
��ѯ�̵꣬ȷ������������ļ�������ͣ�Ȼ����б���ѡ�������֪��������
û�а취ȷ����ʹ��Other(����)ѡ��ͨ����Ч��
APM�汾
���ѡ�����������������������ֱ������ѡ��APM 2.5+3DR Power
Moduleѡ����������Dz�ͬ�汾��APM(��Pixhawk����PX4)����ѡ�����ҵ�
��ѡ��ͼ9-21 ��ؼ��������ҳ��
9.2 ̽��Mission Planner�������
�ɵú�!���Ѿ�������䱸APM��������ֱ������������!�������ǻ���������
�۲�һ��Mission PlannerӦ�õ�����ܡ���ĿǰΪֹ������ʹ�õĹ��ܶ���
Initial Setupѡ��С����ڣ����ǽ��о�����ѡ��е�һЩ���ܡ���Щ����
�������Ѿ����۹��Ĺ������ƣ����Ǵֶ����¹��ܡ�����������
ConfigTuning(���õ���)��ť��̽�����������˵��е�һЩѡ�
9.2.1 ����ģʽ
�����Ļ(��ͼ9-22)ʵ���Ϻͱ���ǰ�����۵�Flight Modes��Ļ��ȫ��ͬ��
�����ʹ�����ҳ��Ϊ���ߵ緢����ϵIJ�ͬ����λ��ָ����ͬ�ķ���ģʽ��ͼ9-22 ����ģʽ��Ļ
9.2.2 ������
�����·���Ա��˵������Χ��(Geo Fence)�����Ǻ�����İ�ȫ���ܡ�����
������������������ɵ㸽������һ�������Χ������������������Խ�÷�Χ����
�Խ�����Ϊ��һ������ǣ������������ֱ�����ķ���!APM��ʹ�ó�ʼ���λ��ָ��
�����㣬�ɴ˿�ʼ��������Ļ��ѡ���ѡ��涨�������ķ��о��룬�Լ���Χ
������ͻ��ʱ����������������Ҫʹ����һ���ܣ�ֻ���ѡ����Ӧ�ô��ڶ�
����Enable��ѡ��Ȼ�����������ò���(��ͼ9-23)����ס������IJ���ʹ�ù�
�Ƶ�λ���������е����ֱ�ʾ�ף�������Ӣ�ߡ�ͼ9-23 Geo Fence��Ļ
9.2.3 ��������
��������������Ķ��������˻������£��Ϳ�����˵��������ij�ַ�ʽ������
����ֱ�����������˼·�ǣ���ͬ�����˻��в�ͬ�ķ������ԣ��Զ���ʻ��(����
�ǵ�ʾ������APM)���������ƥ����Щ���ԡ��������ǵġ�С������������������
�Բ�ͬ��һ��35���ء��¹ҵ�������İ���ֱ����������ʹ������������ַ�����
��ʹ����ͬ���Զ���ʻ�ǣ����Ҷ�����и������Ա����κ�һ�ֻ����й�����
����������APM��������ڵ�(��ͼ9-24)����������ʹ��APMƽ̨������֮һ
�ǣ����м������IJ�����������������������(�ֹ��ܳ����˱���ķ�
Χ)�����ҳ���������һЩ�ı����������֪���Ĺ��ܡ�����Ե������˻��Է�
����������Ӧ�����˻����Զ���ƽ���ܵ����жȡ�������ͣλ���Լ����������
�����������ʵ�Ӱ�졣ÿ�����붼��һ����������˵���˸û���λ�öԷ�����
��Ӱ�졣�������ң���̨���������ڷ����������ڼ��Mission Planner��
����Щ������ʵʱ�۲���Ч����ͼ9-24 ������������
9.2.4 ��չ����
��չ������Ļ���������������ķ������Ե���(��ͼ9-25)����չ������
ʱ�����PID(���������֡���)����������Ļ���Ե�����������3���˶�(��
����������ƫ��)�������������һ��PID�������㷨�����ֿ������ڴ��ģ��ҵ��
��ϵͳ�зdz����С���һ����ͨ������һ�����ƻ�·�������������ֵ����ͼУ��
���õ�Ԥ�ڵĽ����
���˵��ǣ�APM���ֳɵı����ã����ڴְ�װ��˵�������úܺá������
�������ֵò���Ԥ�ڣ��������Ҫ����PID�Եõ���õ����ܣ����ǽ������һ����
���е������о���PID�����ܸ��ӣ������˱���ķ�Χ������һЩѡ������Զ�����
APM��PID���ã��������Ƿ�����һ���̵Ľ���û��ΰ롣��ʹ�������˵��һ��ѡ
�������ѧϰPID�����������Ա������̨�����������Ҳ��ʧΪһ�������⡣
�������ⷽ�����Ȥ�����ǵ���վ���ṩ��һ���ܺõij�����
(http:gettingstartedwithdrones.compid-tuning)��ͼ9-25 ��չ������Ļ
9.2.5 ������
������ҳ��չʾ��APMƽ̨������������(��ͼ9-26)������Ļ��ʾ�ܳ�
�IJ����б����������������ڶ��ƻ����������������������������б�̫
�������ڴ�һһ���ۣ����ǵ�Ȼϣ�����ܹ��Լ�����̽�������ǣ�һ��Ҫע�⣺
�ı���Щ����ʱҪС��!�����������������ã��ڸ��ĺ��Է�֮ǰ����APM��վ��
��Ardupilot��վ�Ͽ����ұ��������������б�
(http:ardupilot.orgcopterdocsparameters.html)��ͼ9-26 ������
9.2.6 ��������
��ĿǰΪֹ�����黨�����൱��ƪ������ͨ��ң���̨��ң�����ݷ��͵�����
վ�ķ���������������Ļ(��ͼ9-27)���Dz鿴���������ݵĵط��������
Flight Data(��������)ѡ�ʱ���ͻ�ע���Ļ�Ҳ���һ���ܴ�ĵ�ͼ��ͼ
�Ͻ�ʵʱ���·��������ڵ�λ��(ֻҪ�㰲װ��GPS)��ͼ9-27 ����������Ļ
Ӧ�ó�����ཫ��һ����Ϊ���������ֵ���Ŀ���ϰ벿�ְ���һ������ܺ���
Ϥ���DZ�������������һ����ȫ�ߴ�ɻ����ܹ������ĵ�ƽ�ǡ�Ψһ�IJ�ͬ�ǣ���
�ǵĵ�ƽ������һЩ�����������ֱ����صĸ������ݡ�����DZ���ͨ�����ŷ���
���ķ����ƶ���ƽ��(����ɫ����ɫ����ָ�)����ʾ��߶ȣ�������ʾ��������
������ģʽ��GPS״̬�����ˮƽ�����̷���
��ƽ��֮�µĿռ�������ʾһЩ��APM���ص���վ�����ݵ㡣��Щ���ݵ��ڷ���
�зdz����ã����ǽ�������ȷ���������ķ����ٶȡ�������ɵ��λ�ú͵�ǰ�߶�
�ȡ�
9.2.7 ���мƻ�
������ǽ����˽�һ�·��мƻ���Ļ��������������Ļ�滮��������
(��ͼ9-28)��է��֮�£����ͷ���������Ļ�dz����ƣ���Ϊ��Ҳ����ͬ�ĵ�ͼ�����������ͼ����������ӹ��ܡ�ͼ9-28 ���мƻ���Ļ
������������·���㣬һ�ж������������Ļ�Ͻ��й滮������������
����Σ����Ƕ���һ���������������ض�γ�ȡ����Ⱥ߶ȵ�·������ɡ��㻹��
���߷����������ÿ��·��ʱӦ�ý��еIJ����������磬�����ϣ������ͣ30s������ֱ��ת����һ��·���㣬�Լ��ڵ���·����;��Ӧ�ÿ��Ƶķ����ٶȡ�
�ڽ����κ���������֮ǰ����ʵ�������˹������Ƿdz���Ҫ�ġ�ÿ������Ա��
Ӧ���ܹ���GPS���ߴ�����ʧЧʱ�˹����Ʒ�����������
ƽ�����������������
��ȻMission Planner��һ����ȫ��Ӧ�ó������Թ滮��ִ���������мƻ����������ֳ�ʹ�����������Ǽ��������飬��Ϊ�������ڱʼDZ����ԡ�������ϲ��
ʹ�ý�С�İ�ƽ����ԣ����ٷ���ʱ��ҪЯ�����豸������ƽ�������������ֱ
�Ӱ�װ��2.4 GHz���ߵ緢����ϣ������п���ϵͳ������һ�����������ֳ�����
���õ�ƽ����Ը���Ȥ����������3DR��װӦ��Tower��������ʷ�ƾõ�Droid
PlannerӦ�õ����°汾���������Ҫ�˽�������ƽ����Ե���վ��֪ʶ�����Է������ǵ���վ(http:gettingstartedwithdrones.comground-stations)��
9.3 ������
�Ӽ�����˵���������Ѿ��������������������������Ѿ���װ�����п�����
������ϣ��㼸�������������Զ�����в��ԣ��������ܲ��ܺܺõط���!��
�ǣ��������������ṩһЩ���顣������ң�ط��к�İ�������ǽ��������Ķ�ʣ
�µ��½ڣ����õ����������ȫ�ķ�ʽ���С��������Щ�½ڵ��Ķ�֮�����
�Լ������²��裺
1.ֹͣ������ת�����ٴμ�����е綯������ת�����Ƿ���ȷ������ܻ��ǵ�
�ڱ���ǰ����½��У����Ǵ�ESC�н�������ͷ����綯��ʱ�в�֪����ȷ�ķ���
�������Ǹ��˵�ʱ����������ĵ綯��(Ĭ�ϲ���������ݸ����²��������
3s)��һ�μ��һ���綯�������������ת��������������������ͷ�е�����
������ʹ�䷴����ת��
2.���������رա��綯����ȷ��ת������£����APM�Ƿ���ȷ���Զ���ƽ����
����ͨ����������ת�綯����ͬʱ�ֳ�����ֱ��������ij������������б��ȷ����
���APM�Ĺ�������Ԥ�ڣ���Ӧ���Զ�����綯��(����������)ת�١�������ֲ�
��ȷ����������ESC�Ƿ���APM�϶�Ӧ��������ӡ�
3.�����ĿǰΪֹһ����������ô����װ�����������������!��Ҫ�ż�����
������ɡ��������ת�������������ܷ�������ֱ�����뿪���档��ʱע����ݸ�
�Ŀ���Ҫ��͡�ȷ��һ��������������ָ��ȷʵʹ������������С����һ��
����ȥ�������������Ӵ����ţ�ֱ�����1��2Ӣ�ߡ���Ҫ̫�������棬�������Ч
Ӧ���ܻ�����鷳������ЧӦ�������������ſ��Ŀ��������Ӵ���ʱ��������
�ɵ��Ŷ����ܽ��������������ܡ�
4.����ʵ��!�ⲻ��һ���������������ղ�����õ����������ڻ���ʱ�����
��ķ��������Ժ�������ȡ�óɹ���
��10�� ��ȫ�������εķ���10.1 ��ȫ��һ
�������ճ������о�����������ȫ��һ����仰�����ɺܳ�֣������ܱ�����
�������˵İ�ȫ������κ��豸���������ɶ�����Ҫ���ֹ�����С��UAV����ȫ�������εط��У���ȷ���㳤ʱ��زμ���������������ͷ���С��UAV��������
����������Դ���ȫ����Ҫ�ԡ����ǶԷ�����ģ�ͺ�����UAV���������ס���
�DZ����еĸ��������л����˻��ѧϰ������ǿ�����Եļ���;���������
ȫ��ȫ������һ�п�����ɲ����ɹ�����ȫ������������
10.2 ��ѵ�ͽ���
Ҫ��̽������ֱ������ͬʱ���ְ�ȫ���ܴ��һ���ֹ����Ǿ����ܵ�ѧϰ����
�ļ�����DZ�ڷ��ա�С��UAV�������ƺͰ�ȫ�Լ�������ȡ���µĽ�չ��������Щ��
չ�ܹ���֤���а�ȫ�����ǣ����Dz����������Զ����п���ģʽ��GPS�������ȶ�ģ
ʽ����������ԣ����Ƕ����κ��豸�����ͺͽ�������ʱ�������εIJ�����Ӧ֪
����νӹܷ��������˹����Ʒ��С�û��ʲô�ܹ�������Լ���֪ʶ�����鷽���
���ۣ��Լ������ݸ��ϡ���ʵ����
>ʹ�÷���ģ�����������γɼ������ͱ��ܵķ��п���������
10.3 ��Դ
��������ȫ�������εطŷ�UAV�����ְ�𣬵����㲢���µ��������Է�����
����ơ��������߷������κβ�ȷ���ĵط���������Ѱ�������������ɹ�С��UAV
������ʹ�õ���Դ��������̳�����������Եõ�����UAV��ȫ�Ժͼ����Ľ��鼰
��Ϣ��
2014����ף���3����֯����������վ�(FAA)���ܺ�������С��UAV��ȫ
���е�����˵�������ʵ������˹�ʶ����3����֯�ǹ������˻�ϵͳѧ��
(AUVSI)������ģ��ѧ��(AMA)��С�����˼�ʻ���������ϻ�(SUAVC)������
����һ�ݼ�ʻС��UAV������Ϊ�����й������ǽ���İ�ȫָ��������һ
���ܺõ���㣬�������ǽ�������������ڵز鿴��Щ������Ϊ�����Dz��Ϸ�չ
�ġ�������������б��ж�������˷����ܽᣬ����һЩרҵ�������ε�С��UAV���л��˼·��ӽ��ܡ�
10.4 ��Ҫ����
��ҪSUAS��Դ�����Ҫ���Ӱ�����
��AUVSI(http:www.auvsi.orghome)
��AMA(http:www.modelaircraft.org)
��SUAVC(http:www.smalluavcoalition.org)
��FAA(http:www.faa.govuasgetting_startedfly_for_fun)
���⣬�����Բ������ǵİ�ȫ�Թ�������б�
(http:gettingstartedwithdrones.comdocsUAVSafety.pdf)��
AMAҲ��һ������RC�������������ʵ���ĵ�ҳPDF�ļ�
(https:www.modelaircraft.orgfiles105.pdf)��
10.5 �ؼ����а�ȫ����
������ʱ����ȫ�����εķ���Ӧ��ʼ���������Ҫ���������Ϥ������
����ܹ��ܺõ�����Χ�����ǹ������죺
��ʼ����400Ӣ�����µĸ߶ȷ��С�ȫ�ߴ��������500Ӣ�����ϵĸ߶ȷ��С�
�������ܹ������˼�ʻ�����������˼�ʻ������֮������100Ӣ�ߵĻ�������
�����������(LOS)֮�ڷ��С�����ζ�ţ����ڲ���ʱʼ���ܹ�������ķ���
�����������ǵľ��飬����̫����ͬ�ķ����Ϲ۲�ɻ����ܲ����ܼ������⡣��ϸ
���Ƿ���ʱ��������ķ���ɫ������ܻ���LED��������ʶ������������ǰ��
�ͺ�ˣ��Ӷ����ַ���С�ʹ��FPV��Ƶ�۾���ȫ���е�˵����μ����ں���IJ�
�֡�
�����뵱�ص�UAV����ģ�ͷ����������߾��ֲ����������ĵ��������������Դ����Լ���MeetUpȺ�����۹���UAV��ȫ�������η��е����ʵ���ķ�չ��
������Ҫ���κλ�����5Ӣ�ﷶΧ�ڷ��У���Ҫ�ڻǰ��һСʱ���ڴ�������
�ݵ�3Ӣ���ڷ��У�Ҳ��Ҫ�ڹ��ҹ����߾��»��ط��С�
https:www.mapbox.comdroneno-fly�ϵĽ���ʽ��ͼ��������ʶ���������
���μӷ��пγ̡��⽫�����ڰ��㸴ϰ����ԭ��������ȫ�ߴ�ɻ�����Ա����
��������С��㻹����Ѱ�ҹ���С�����˷��������ݵĵ��ؿγ̡�
����ÿ�η���֮ǰ��һ��Ҫ�������豸��ȷ�����������������������״
̬��
������ֻ��Ϊ����Dz!��Ҫ��δ��FAA��Ȩ������½�����ҵĿ�ĵķ��С���Ӧ
���ڻ��۶��꾭����ٿ������ַ��С��������ı��ն�������ʹ�ò��DZ��裬����
����һ�ݱ����Ǹ������⡣�������AMA���о��ֲ�����Ա�ʸ��оͰ��������ı�
�ա���ҵʹ�ñ��蹺���ա�
��������³ç�ط��С��ⲻ����Σ�գ����Ҷ������ڵ��������ǺͲƲ����Dz�
���صģ�����ܻ�����յ���Ʊ�߶����һ��Ҫע�ⰲȫ��
10.6 ��һ�˳��ӽ�
������������������ϲ������Ƶ�۾����е�һ�˳��ӽ�(First-Person
View��FPV)���У���Ƶ�۾��ܸ�����Ա�������ڼ�ʻ���еĸо���UAV��ǰ�˰�װ
һ��С������ͷ���ṩ���˻��ӽǵ�ʵʱ��ͼ��FPV���еĿ������й鹦������֯��
С�����˻�������2015�������·ݵġ�Make����־���������ɫ��FPV���Ժ���
Ϣ��������һЩ��ʾ��
����һλ�������У���Ϊ�۲�Ա������Ҫ������Ϊ���ڶ�˫�ۡ�������ֱ����
������֮�ڣ��Կ��ܸ��ŷ���·�����κ�������Ծ��档
������������FPV����Ա��ͨ���ʹ�õ���Ƶͨ��(Ƶ��)��������պ��ܼ�
�ȵĸ��š�
��ǰ��Զ����Ⱥ�����ݡ���·�͵�����·�Ŀտ���ƫԶ����������������ӻ�������FPV����������Ϊ���ǿ��ܻ֪�����ؽ��� ......
������
ǰ��
��1�� ����
1.1 ����
1.2 Ŀ�����
1.3 ���˻��û�����
1.4 �������м�ʷ
1.4.1 ���ߵ����ģ�ͷɻ�
1.4.2 оƬ�ij���
1.4.3 ���˻�����
1.4.4 GPS�ķ���
1.4.5 ������
1.4.6 �����ֻ�
1.4.7 С���Զ���ʻ���п�����
1.5 ����ԭ��
1.5.1 ����
1.5.2 ����1.5.3 ��������
1.5.4 ����
1.6 ���л������ò��ݸ˿��Ʒ��������˶�
1.6.1 ����
1.6.2 ƫ��
1.6.3 ����
1.6.4 ����
��2�� ����
2.1 ʲô�ǻ���
2.1.1 ����ʸ��
2.1.2 ���������
2.1.3 ����
2.1.4 ����ƽ��
2.2 ����������������
2.3 ��������
2.3.1 ��1������װѹí��ĸ��
2.3.2 ��2������װ����
2.3.3 ��3������װ�ɾ����
2.3.4 ��4�������������ӿ�ܵ�3�� ����ϵͳ
3.1 ������
3.1.1 ����
3.1.2 �ߴ���ݾ�
3.1.3 ƽ��
3.2 �綯��
3.2.1 �ߴ�
3.2.2 �KVֵ
3.2.3 ������ʵ�������
3.3 ������
3.3.1 �����ٶȿ�����
3.3.2 ����
3.4 ��������
3.4.1 ��1������װ����
3.4.2 ��2�������Ӳ�����ͷ
3.4.3 ��3������װ�ٶȿ�����
3.4.4 ��4�������ӵ�Դ
3.4.5 ��5������װ��ˢ�綯��
3.4.6 ��6����������ˢ�綯��3.4.7 ��7��������
3.5 ��
��4�� �������
4.1 ʲô�Ƿ��п�����
4.1.1 �Աȿ�Դ���Դ
4.1.2 ������
4.1.3 ��������
4.1.4 ��������
4.2 ��������
4.2.1 ��1������װ���п�����
4.2.2 ��2�������ӷ��п��������
4.2.3 ��3�������������ӿ��
4.3 ��
��5�� GPS�����̺͵�ؼ����
5.1 GPS
5.2 ����
5.3 ��ؼ����
5.4 ��������
5.4.1 ��1������װGPS�豸5.4.2 ��2��������GPS��������APM
5.4.3 ��3������װ��ؼ����
5.5 ��
��6�� �����
6.1 ʲô�Ƿ����
6.2 ��õ�Ƶ��
6.3 ȫ����صIJ�ͬģʽ
6.4 �Ա�PWM��PPM
6.5 ��������
6.5.1 ��1����ȷ������
6.5.2 ��2������װ���ջ�
6.5.3 ��3������ͨ���ջ�
��7�� ң���̨
7.1 �������������
7.2 ��������
7.2.1 ��1������װ����վ��̨
7.2.2 ��2��������װ��������̨
7.2.3 ��3������ͨ��̨
7.2.4 ��4������װ��������̨��8�� ����ͷ��FPV�豸
8.1 ���е����˻�����ͷ
8.1.1 M43���
8.1.2 Mobius�˶�����ͷ
8.2 ����ֱ������FPV
8.3 ��������
8.3.1 ��1�����̶�����ͷ֧��
8.3.2 ��2�����̶������
8.3.3 ��3������������ͷ�ڿ��֧����
��9�� ArduPilot Mega����
9.1 ��������
9.1.1 ��1�������¹̼�
9.1.2 ��2�������Ӳ���ɱ�Ҫ������
9.1.3 ��3�������ӿ�ѡӲ��
9.2 ̽��Mission Planner�������
9.2.1 ����ģʽ
9.2.2 ������
9.2.3 ��������
9.2.4 ��չ����9.2.5 ������
9.2.6 ��������
9.2.7 ���мƻ�
9.3 ������
��10�� ��ȫ�������εķ���
10.1 ��ȫ��һ
10.2 ��ѵ�ͽ���
10.3 ��Դ
10.4 ��Ҫ����
10.5 �ؼ����а�ȫ����
10.6 ��һ�˳��ӽ�
10.7 ���еij��Ϻ�ʱ��
10.8 ����ǰ����б��ͷ�����־��Ϣ
10.9 ���������
10.10 ���к�ά����־
10.11 ����ͼ��
��11�� ��ʵ�����е�Ӧ��
11.1 ��������˻�
11.2 ������Ӱ11.3 ��ͼ���������
11.4 ��ũҵ
11.5 �������Ԯ
11.6 ������ʩ���
11.7 ��������
��12�� ��չ���˻�������
12.1 ����һ������ͷ�͵�һ�˳��ӽ�
12.2 �������������ɼ���������
12.3 �ı��ٶȣ�����λ��Ԥ�������
12.4 �ӳ�����ʱ��
12.5 �������
���˻������ǽ��������ٷ�չ��һ�������������ھ��û���������������
�˻�����ɱ����������ܶ��������ܻ�ӭ���ڽ�����һ��ʱ���ڣ������ۡ������
Ӧ�ö���������չ��
���ź��յ����豸���������ʹ���ļ������Ӳ���IJ��Ϸ�չ�����˻��Ѿ���
���˹�ȥң�ط������ķ��飬�������������˶�Ŀһ�µļ�������Ϊ�����ĺ��ջ�
���ˡ��ִ��������˻������ܹ��ڵ��������ִ�������������൱ǿ�������
�������������������������Ե���Ļ��������ܵ��������
���˻��Ĺ㷺Ӧ��Ҳ�����˷�չԽ��Խ׳��İ�������������ģ�����ߡ�����
����������Ӱ�����߲��ϵؼ������С��������˻������ű���Ҳ�������ⷽ
����鼮��������ʤ�������Ǹ����ŵİ����������һ��ϵͳ�ؽ������˻���
����ԭ�������������Լ���ȫ����Ľ̡̳�������Kilby�����DZ�д������Terry
KilbyΪ�������רҵ���������˻��������֣�Belinda KilbyΪ�߱��Ӿ�������
���Ľ�ʦ����������˻��Ļ����������ԭ�����֣�ͨ����һ��С�����˻�����
���̵���ϸ���ܣ��Ӷ�ʹ���߶���һ������������ȫ����˽⡣���������
�����˻���ʵ���е�Ӧ�á����а�ȫ��֪��ʵ��֪ʶ�����ṩ������������Դ��ʹ
���߿��Լ�����չ�Լ���֪ʶ�漰�����������飬��Ϊ���������˻��мҡ����鲻
���ʺϳ�ѧ������ѧϰ�����ʺ���һ������������߲ο���
����ķ��빤����Ҫ��Ҧ����ɣ���ܲ������������ҫ�ɵ���ҲΪ�����
���������˹��ס�ͬʱ���ڴ˸�л���¹�˾�ı༭�ѽ��ڷ�������и���İ�����
ָ����
����
ǰ��
������Belinda��Terry Kilby�����������˻������ߡ�������Ӱʦ�������ߡ���ѵʦ��Ҳ��һ�Է��ޡ�����һ�����ͬʱҲ����˱˴˶Լ�����������ר
�������顣��2010�������ǵĹ�˾Elevated Element�Ѿ���ƺ�������������
����ʵ�ú�����Ӱ��С�����˷�����(Unmanned Aerial Vehicle��UAV)����Ϊ
�ⷽ��ij����ߣ����dz�Ϊ���ڵ���ý��ķ���ʽUAV���������ˡ����Ǹ���Ӳ������������Ľ�չ�Լ����˻������ű�������ˣ����ǿ����������ʹ��·��������
�˻��������ߺ��û���
ͬ���鼮�е�������
2013���^�����Ƿ����ˡ����˻��������Ͷ���Ħ�������ǵ�һ����ȫʹ��С
�Ͷ���UAV�������Ƭ��������ĵ�������������������������Լ��豸��������
���ݱ�ġ���Ƭ����ʱ��˳�����У�չ����������������������������к�ʹ��
��Щ���˻�������Ƭ�Ĺ����У���Ƭ�����IJ�����ߡ�ͨ���Ͷ���Ħ�ٽ���������
���ң����ǽ����鷢���ᰲ���ڰͶ���Ħ����ó�����ĵġ�����֮�ۡ��۾�̨�Ͼ�
�С�����һ�������ĵص㣬��Ϊ��27��¥�������ӽǺ����ǹ���������ʮ������
�������
�����Ŀ��
�����Ŀ�����ԡ�С������(Little Dipper)300����������ֱ������������
��Ϊ�������ܿ��л����˵�ʵ��֪ʶ�������Ķ����鲢��ѭ���еIJ���ͽ��飬��
����ѧ������ֱ�����Ĺ���ԭ�����Լ�����������һЩ�������Ľ������������
���ĵط������ǻ�������ɹ����Ե����ѡ������ʺ϶�������ƫ�õ�ͬ����
����������ѡ������������ỹ�ǰ���ֱ������ʹ�õĶ�����ͬ�ĸ��
��С��������һ�ֿ�Դ��ƣ�����ļ����Դ�
http:gettingstartedwithdrones.comlittledipper-build���أ�Ҳ����
��http:www.MakerShed.com���������ġ�С����������
��Ҫ����ʧ�ܣ�ÿ���˶��᷸����Ψһ��Ҫ���ǣ����Dz��ϳ��ԡ�����������
���ջ�������һ���������飬�����ͨ���������Խ����ʵ�е����⣬���յõ���
֮���ľ��顣
�����ֲ������ٶ�����С�IJ��Ҳ�ܹ������ɰܡ�����ʹ�÷���
�����ÿ���½ڽ��������˼�ʻ�ɻ�������һ���ض����֡����е�һ�¿��ܽ�
�������Ļ���������һ�¿����������ʹ��ȫ��λϵͳ(Global
Positioning System��GPS)�������еķ���������Ŭ�����ܾ����ܶ�����⣬��
��Ҫ�μǣ�������һ�������鼮�������ǰ��������UAV�ٿ�ȫ�顣������Ǹü���
�����֣��������д�����Ҫ�����ݹ�����ϸ��Ħ����ʹ������˻��Ѿ�����Ϥ����
��Ҳ���Կ϶�������Ȼ�ܹ��ҵ�һЩ����ֵ����Ϣ���뵽�Լ���֪ʶ���С�
�����1��֮����Ӧ�ûᷢ��һ����Ҫ��ģʽ�����½ڶ��Ƚ��ܱ�������
��֪ʶ��Ȼ�������ʾ�����зֲ����⡣���������Dz��DZ����н��ܵ�ͬһ�ַɻ�
������Ҫ��ÿ���½ڵ����۲��ֶ������ھ��ֵ����˻�������С�͵�250����
��ֱ���������͵�1000������ֱ����������㲻��Ч�����ǵ��ͺţ�������������
��ָ�ϣ������Լ�����Ҫѧϰ���е����ۡ�
�������Ǿ���ḻ�����˻���ʻԱ����ҵ�మ���ߣ�������Ϊÿ���˶��ܴ�ÿ
һ�½ڵ����۲����л��档���ǽ������Ķ���Щ����֪ʶ�������Ҳ����ʾ������
�����������Ա��Ķ���������������ѧϰ�����ٿ�ʼ�����������漼����ȫ������
���ڿ�ʼ�����ɻ�֮��Ϊ���ṩ������
����ʹ��Լ��
����ʹ�������Ű�Լ����
>��ʾһ��ע�⡢��ʾ���߽��顣
��ʾ���档
Safari����ͼ��
Safari����ͼ��(http:www.safaribooksonline.com)��һ���㲥ʽ��
����ͼ��ݣ��ṩ���Լ�������ҵ���������һ�������ǵ��鼮����Ƶרҵ���ݡ�
����ר�ҡ�����������Ա��Web�����Ա�ʹ�ҵ�߶���Safari����ͼ�鵱����
����������⡢ѧϰ����֤��ѵ����Ҫ��Դ��Safari����ͼ��Ϊ��ҵ�������������������������ṩһϵ�в�Ʒ��ϺͶ�
�ۼƻ���
�����߿��Դ�����Maker Media��O�Reilly Media��Prentice Hall
Professional��Addison-Wesley Professional��Microsoft Press��Sams��Que��Peachpit Press��Focal Press��Cisco Press��John WileySons��Syngress��Morgan Kaufmann��IBM Redbooks��Packt��Adobe Press��FT
Press��Apress��Manning��New Riders��McGraw-Hill��JonesBartlett��Course Technology�����ټҳ����̵Ŀ��������ݿ������ǧ���鼮����ѵ��Ƶ��
����ǰ�ָ塣����Safari����ͼ�����Ϣ�����Է������ǵ���վ��
��ϵ��ʽ
�뽫�Ա������������ⷢ�������̣�
Make��
1160 Battery Street East��Suite 125
San Francisco��CA 94111
877-306-6253(���������ô�)
707-639-1355(���ʻ��ߵ���)
����Ϊ���齨����һ����ҳ���������г�����ʾ�������и�����Ϣ�������
��http:bit.lygs_w_drones���ʡ�
���ۻ���ѯ�ʹ��ڱ���ļ������⣬�뷢�͵����ʼ���
bookquestions@oreilly.com��
��1�� ����
1.1 �����������������������ͻ���������Ƶ���ؿ������˻�(drone)����ʡ�����
�������˻�����������һ�������������ַ�����������С��ң����߷ɻ���������
�еĻ����ˣ���ȫ����װ�ľ���������˻�������Ҫ����Ϊ��ͬ����Ϣ��Դ������
���в�ͬ�Ķ��壬��ô���Ϊ���˻��Ķ��廮����Χ������˵����ʲô���������
���أ������Ǵ�һ���������忪ʼ��
Τ�ϴʵ�����˻��Ķ����ǣ���ң��װ�û����ؼ�������������˼�ʻ����
�����ߴ�ֻ��
�������dz����������µ�ý�屨���ض����͵����˼�ʻ������ʱ�����ǻῴ
����ƫ��ȫ������ʹ������Ϣ��������������һ��������Ķ��塣Terry˵
��������GPS���Զ���ʻ�ǵ�������Ϊ���ߵ����(Radio-Controlled��RC)����
�������˻��Ľ��ޡ���ij�ַ��������Զ���ʻ����������ʹ�����������Ľ����DZ�
���ȶ�����Terry���������������˻��������У����ǽ�ʹ�����µ�Լ����
���˻�
��GPS�������Ƶ����˼�ʻ��������
ң�ط�����(Remotely Piloted Aircraft��RPA)
�ɼ�ʻԱ�ڵ��������ߵ緢���������������豸���Ƶ��ͺš�
UAV
�����ɼ�ʻԱ������������GPS�������Ƶķ�������
С�����˼�ʻ����ϵͳ(sUAS)
�漰���˼�ʻ���ռ�����������ع��̡�
������ϲ����ϲ�������˻�������Խ�����ʹ�á����ǽ�������ʣ�����ͨ��
˵��С��UAV����������Ӧ�ã������ı��为�����塣�м��ڴˣ����DZ����ǿ�Լ�
�����⣬����ý��ġ����˻�������������չ�������ͼ�ƶ�ȫ���С��UAV
��ҵʹ�����ߵ�ͬʱ�����Ƕ����뾡�������κͰ�ȫ������еĿ��֡�1.2 Ŀ�����
������һ������������������ֱ������ָ��(�Լ���֮�������������)����
������ѧ�͵���ѧ����������ǿ�չ���л������о����������ڣ���Ϥ�����Ĺ���
���豸(�������)���ڳɹ�������Լ���С��UAVҲ���а�����
�����������ij�ֶ���ʱϲ�����Ͳ��εط������Խ�����⣬��ô�ͻ�ϲ����
���л����ˡ�����һ���ܹ����еĻ����ˣ���ȫ�µ��ӽ����ͷ羰����ֵ�û���ʱ
��;�������ҵ��
1.3 ���˻��û�����
������������ʱ��֪������������������dzɹ�֮������ͬ���Կ��л�����ѧ
����Ȥ���˽�����ϵ���Dz������Ⲣ�ҳ���������ı�����Դ��������̳���˽���
������ν����������ļ���;����Terry��ϲ����һ����վ��
http:www.multirotorforums.com������̳�ϵ����ǿ����ط���С��UAV����
�ͷ��еľ��鼰���⡣
�������ڵĵ���������Ҳ��UAV��������֯���ߺ�ģ���ֲ������Ƕ�����������
�ۻ��п���������ס����Գ�����Meetup.com(http:www.meetup.com)����
�����˻�(�������������)�û��顣��һ��ֵ��һ���ĵط�����������ģ��ѧ��
(Academy of Model Aeronautics��AMA)��AMA(http:www.modelaircraft.org)��ȫ�����ĺ���ģ��ѧ�ᣬ������
1936�ꡣ�����ڰͶ���Ħ�ͻ�ʢ�ٵ�����һ���ܳ�ɫ�����壬Ϊ��������UAV����
���������˺ܴ�Ĺ��ס�������ϵظ�л�������Ǽ�����һ�����ÿ���ˡ�
>���ڰ�ȫ�����εķ��л��AMA��һ���ܺõġ����ʵ��ָ�ϡ�PDF��
��(http:www.modelaircraft.orgfilesreport_on_revised-550-560-oct-8-
2012.pdf)��
1.4 �������м�ʷ
������Ϊ�����˻�������������ķ����������ߵ����ģ�ͷɻ���оƬ��GPS���������������ֻ��������������˽�һ�¡�
1.4.1 ���ߵ����ģ�ͷɻ�
1937�꣬�������ߵ�ת�����˹�ԱRoss Hull��Clinton DeSoto������ң��
���еĵ�һ�ι�����ʾ����1937���ļ����^��������ƺ���������չΪ13Ӣ��
(1Ӣ��Լ0.3��)�Ļ�������ڿ����Ҹ��ݵĹ��ظ��ؽ�����100��γɹ���ң��
���С�����һʱ����Hull�ڼ������ߵ�װ�õ�����ϴ������ȵ�λ����ͨ�����̵�
������˷������Ч�ܣ�����������˸����������ĵ���ģ�ͷɻ����ؽ��ջ���
Walter Good���������ֵ�William Good��1940���1947�������ȫ������ģ��
�ھ����л���˵�һ�������DZ�־�Ե����ߵ����ģ�ͷɻ�����Guff���ڹ�ʷ��ɭ
����Һ��պ��첩���(��ͼ1-1)���С�
ͼ1-1 Good�ֵܵ����ߵ���Ʒɻ�����Guff
1.4.2 оƬ�ij���
1958���ļ�������������˾���¹�Ա����ʱ�����ᷢ����Jack Kilby�Ƴ��˼�
�ɵ�·�����ǵ�����ҵ��һ����¡�����оƬ��������һ���СΪ716Ӣ���116Ӣ��(Լ1.1���ס�0.16���ף�1Ӣ��Լ2.54����)�ı���Ƭ�ϼ�����һ����
��ܺ�����Ԫ����Kilby��֪���������Ԫ��(����Դ����͵���)�����Բ��ú���
��ʽ�������ͬ�IJ������죬���������������������·�Ľṹ��
���û��Kilby��С��оƬ����������ʹ�õ�������������������ܳ��֡�����
��һ��������ô��ļ��������˽������۵��͵��ԡ�
1.4.3 ���˻�����
��ijһʱ�̣�����ģ�ͽ��ﵽӲ����ơ������źź����ߵ��������ܴﵽ����
��߶ȡ�Ϊ�˳�����һ���ƣ�����������εļ�����ʵ������ͨ�źͿ��ơ�
1.4.4 GPS�ķ���
GPS����(http:www.gps.gov)��������GPS��
ȫ��λϵͳ(GPS)������ӵ�еĹ�����ʩ��Ϊ�û��ṩ��λ����������ʱ
(PNT)������һϵͳ��3��������ɣ�̫�ղ��֡����Ʋ��ֺ��û����֡�������
���������ָ�����Ӫ̫�ռ����Ʋ��֡�
GPSϵͳ��36�����Dz��ϵ�������û�����ʱ��͵������ݡ�����װ��GPS����
�����豸������ʹ�������κ�4�����ǵ����ݼ�������Щ���ǵ����λ�á���GPS��
��֮�䱣��������ֱ����·�ǹؼ�������Ҳ�����ӵ�������������(����4��)����
�ӡ�����ֱ����·��Ҫ����ʱ��������������ڽ��յ��ɿ���GPS�źš����ǽ���
��5����������������˻����е�Ӱ�졣
>GPS�ĸ�����Ϣ
����ϸ�ڿ��Բο�GPS.gov������ҳ�棺
����How GPS Works��(http:www.gps.govmultimediaposter)
����GPS Applications��(http:www.gps.govapplications)
1.4.5 ���������û�л����������˺��������˻��Ͳ��������ڵķ�չ�������̵ꡢ��ữ
ý�����̳ʹ���ǿ�������������ͬȫ�����κεط�������һ��ѧϰ��Terry�ڵ�һ
����������ֱ����ʱ�۲������˵���Ʋ����������ʡ�UAVԽ���ܣ���������δ��
�����˻�Ӧ���о�Խ��Ҫ��
1.4.6 �����ֻ�
���ż�����������ʹ������ߴ�Ĵ������С����ģ�ͷɻ���ʹ�������ֻ�Ҳ
ֻ��ʱ������⡣������ת�����ֻ�ʱ������ķ�����֮�ı䣻ͬ���Ĵ�����Ҳ
�������ڿ���С�����˻�����Ϊ�ƶ���������ʦ��Terry��Ϥ�ƶ�Ӧ�ú������ֻ���
��ϵͳ���ܵĿ�����Ŀǰ�������������˻���ͼ��������һЩӦ�ó���
1.4.7 С���Զ���ʻ���п�����
GPS���������������ֻ���������һ����������˻��Ĵ��ԡ������п�������
�����Զ���ʻ����2000��ǰ��ʼ�����ڰ����������Ķ���ֱ�����ϡ����ھ���
GPS���ܵķ��п�������Ԫ���ɵ¹���MikroKopter��˾����ģ���������й���˾
��������һװ�á���Լͬһʱ�ڣ�MultiWii(http:www.multiwii.com)��Ardupilot(http:ardupilot.com)��Open
Pilot(https:www.openpilot.org)�ȿ�Դ��Ŀ������MultiWii����������
������һ����Ȥ����ʵ����һ��װ����ʹ��������Wii�������ϵĴ����������ġ���
���ܲµõ���Ardupilot�����������Ϊ���������Arduino��
���죬С���Զ���ʻ���Ѿ����˺ܴ�ķ�չ�������ͺ��������������С��Զ�
�������Զ�������Ƚ����ܡ����������ڼ���ǰ��ֻ���ڶ���ģ�����ҵ�����
�˿��Կ����������ķ�չ�ж�ô�졣
���п��������С���Զ���ʻ�Ǵ�����
���д�������Ȼ����ȫ�µĸ���������ն�����㹻С�ɺ���㣬������UAV
�Զ���ʻ����ʹ�ã�
����������ʽ����
������
������ת�ٶ�
���ټ�
��������
ѹ��������
ͨ����������ѹ�����㺣�Ρ������������������������������һ�����Բ���
��Ԫ(Inertial Measurement Unit��IMU)
1.5 ����ԭ��
���ն���ѧ��һЩ�Ĺ�����ӵ��������ɡ�Ϊ�˺ܺõ��������ǣ���һЩʱ����ϰţ�ٶ�����û�л����ġ�������̸����������ʱ��ָ���Ǽ�
�����������������������һ�������ϵ�����ƽ��ġ���һ�������������������
�����ͬ������������ʹ��ھ�ֹ���������ƽ�⣬��������Ÿ�ǿ�����ķ����
�١�
1.5.1 ����
�����������������ϵ����á���һ��ѧԭ����ʱҲ�����������������������
���������������������ƽ����߿˷�����(���Ǻܿ콫�������������һ��)��
����������ġ�����ʹֻ����ʱʧȥ�������������������ʹ�������ء�������
ʼ���ն�Ҫ����һ������������ע��������ܷ��������طֲ������������ϣ���
�Ƿ������е�ijһ�㡪����Ϊ���ġ����������������Ӱ�����
1.5.2 ����
�����������Ķ����棬�DZ��ַ�����λ�ڿ��е�������(��ͼ1-2)����װ�л�
���ķ������ϣ��������������ͻ��������Ŀ��������������Ϸ��������ٶȽϿ죬�������ѹ����С�������·������ٶȽ�������˿���ѹ���ϴ����ڻ����Ϸ���
��ѹ��С���ɻ�����ֱ�����������롱���С���������ˮƽ����ʱ�������������
���������Ҫ�����������������������
ͼ1-2 �����ڿ�����ǰ�ƶ�ʱ��������
1.5.3 ��������
���Ƿ�����������ʱ�������������(��ʻ��)���⣿�������ܵ���������
�����ǿ����������ڴ��������κ��ٶ��ƶ������嶼������һ���Ŀ�������������
��������������˶��ٶ�����������������Ƿɻ������������й⻬����
��ԭ������������ʹ������Χ�Ŀ�����˳����������������������߳�����Ч
�ܡ���������Ҳ������ʽ�ɻ������֮��������������ܵ�ԭ��������ֱ����
(���˻�)��˵������һ��ǿ���������
1.5.4 ����
�����е�������ʹ�������ڿ����ƶ��Ļ�е�������������˶��Ƿ�����������
�������������(������е�ʱ��)��ʹ���κ��ƽ�ϵͳ��ɵġ��������������
�����ɻ�������ǰ����������������������˷�������ͼ1-3˵���˷��е��ĸ�ԭ��
(������)��ͼ1-3 ����ԭ��(��)˵��
1.6 ���л������ò��ݸ˿��Ʒ��������˶�
��UAV���ñ���(����)��ͨ��ң�������ƣ���Ͷ�������ģ�ͷɻ�ʹ��
�Ŀ�����һ��������ң���������������ݸˣ�����ǰ�������ƶ��������ͺŵIJ�
ͬ���㻹�ῴ��һЩ���ء���ť�ͻ������ϡ�ÿ��������ƶ�ռ�����ߵ��豸��
һ��ͨ����
�����������ݸ�������Ҫ�Ŀ���������ռ���ĸ�ͨ����ÿ�����ݸ˵�һ���ƶ�
��ռ��һ��ͨ�������������ݸˣ�����������Ҫ����һ��ͨ�����Ʒ������ķ���ģ
ʽ���á���һ��������Ҫ��ͨ�������Զ�����(Return to Home��RTH)���ܡ���
����ͨ�����������һ�����ؿ��ơ����ǽ��ڱ���������ϸ������RTH�ͷ���ģ
�ͣ����ڣ����Ǹ�����ع۲����������ݸ˿��Ƶ�ͨ��(��ͼ1-4��ͼ1-5)��
>����Ŀ�����˵�����������ʹ�õ�ģʽ2���ߵ�̨���������ҿ���ʹ��ģ
ʽ1��̨�����ֵ�̨��ÿ�����ݸ˿��ƵĶ����෴�������ִ����ߵ�̨����ʹ���κ�
һ��ģʽ������Щ��ֻ̨���ڹ�������ʱ����Ϊһ��ģʽ��ͼ1-4 ģʽ2��RC��������Ҳ��ݸ�����ͼ1-5 ���ݸ���������ƶ�������
1.6.1 ���������ݸ˵�ǰ���ƶ����Ʒ����������š�����˼�壬���ű����Ͼ��Ƿ�����
�ļ���̤�塣�ڴ�����£�����ֵԽ�ߣ��綯����ת��Խ�졣��Ȼ��Ҳ������
����������ǽ��ں����½������ۡ�Ϊ���÷������ڵ����Ͽ����������ű������
�㹻���������Ե������������á�����ǰ����ʱ�����ű���˷�����������������
1.6.2 ƫ��
�����ݸ˵������ƶ�������ƫ����ͨ������Ҳ����������档ƫ������ֱ��
�����߶����������ˮƽ�����ת�������ŷɵ���һ�̶ܹ����ɻ�����ô���ͨ
��������������棬��Ϊ�����������Ŀ���ʹ�õ���ͬһ�����ơ�����ǰ����ʱ��ƫ���ͷ����Է�������Ӱ������ͬ�ģ�ʹ������ת������ķ���
����ֱ�������˶�����ֻ�������������������ģ��ɻ���Ҫ�����ͷ�����
����ɵķ��ж����أ�����ȫ����һ������ʸ�������Ĺ��̡���һ�½�����ؽ���
��һ���̣������˼·���ǵ����ؿ���ÿ�����������ٶȣ�ʵ���κη�����ƶ���
���磬�������������˳ʱ�뷽����������ٶȡ�������ʱ�뷽����������ٶȣ�ʵ��˳ʱ��ƫ����
1.6.3 ����
�Ҳ���ݸ˵�ǰ���ƶ������ڸ�����ͨ������Ҳ��������������һ�������Ϻ�
������б��ͷ�����Ҳ���ݸ�ǰ��ʱ����ͷ��������б����֮��Ȼ���ڹ̶����ɻ�
�ϣ���ͨ����ˮƽ������ͬһ������бʵ�֡�����ֱ��������ͬƫ��ʱһ��������
ʸ������ʵ����ͬ�Ķ��������Զ���ʻ�Ǿ����Զ�ˮƽģʽ�������˷�������
�����Ƕȡ�����ģʽ���ܲ������������ƣ��������������ȵظ��������ʵ�����
���£���������һֱ��б����ǰ�����������ڳ������ֶ���֮ǰ�����һЩ��ϰ!
1.6.4 ����
�Ҳ���ݸ˵������ƶ������ڷ�����ͨ����Ҳ��Ϊ��������������ʹ��������
���������������Ҳ���б�����ڹ̶����ɻ���ͨ�����෴������б����ˮƽ����
(��Ϊ����)ʵ�ַ������ڶ���������ϣ����з�������Ҳͨ��ʸ������ʵ�֡���
����̬�ı仯���·���������б�ķ�����С�����һ�������Զ�ˮƽģʽ�����ķ����ǶȻ��ܵ����ƣ����ֶ�ģʽ���������ơ�����ȷ���Զ���ʻ�������£�����������ϰ��С�ͷ������Ϳ�����̶����ɻ�һ�����Ͱ��������
�������ɣ�ʹ�÷���ģ����
���뾡���ڵ�����ʹ�÷���ģ������(http:getting-
startedwithdrones.comsimulators)��ϰ���ݸ˿��ơ����ǽ�����ͨ���о�����
���Լ�����˳�ֵ��������������Լ������������������ѵ��Ӫ��ʹ��Phoenix
Professional Flight Simulator������������̴���һ��������ң������������
USB�������ӵ���������㻹�������ض����ƶ�Ӧ�ã�����������ѵ�Ӧ����������
��Ŀǰʹ�õ���һ��ģ������Heli-X�����Ǻ�ϲ�������������Ϊ��������Mac�Ϲ�
����
����������˵��ģ�����Ǻ��м�ֵ�Ĺ��ߣ������ڲ�����װ��������µ�
����������ġ����о���IJ�����Ҳ��������ĥ���Լ��ļ��ɡ����������������
������ϰ������һ���ܰ������顣���ڣ�Terry����������һ�������죬��ģ������
��ѧϰ���м��ɡ�������ڷ������������ѣ��Բ��ݸ˿��Ƶ�ǿ������佫�ı�
һ�С�
��2�� ����
2.1 ʲô�ǻ���
�����Ƿ����������塣���������������������ء�������ȡ�������װ�ڻ�
���ϡ������Ĵ�С���Ӷȶ��ֶ����������ǸոնԷ��в�����Ȥʱ��������һЩ
�������dz������ͼ���ڲͽ�ֽ�ı����ϻ��ɵģ����߾���ֽ���ϲ��ж��ɡ�
���죬����ʹ�ü�����������(CAD)������ƿ�ͼ��Ȼ���ü��������(CNC)
�����ӹ������ǽ��ڱ��½����������е�������ͣ��������ȼ��о�һ�£���
������η������ġ�
2.1.1 ����ʸ�������еĻ������㶼�ܿ���һ����ͬ�����ʡ������Ƕ����˳ʱ�����ʱ���
�����������Ƕ������������������ƶ��Ļ�����ÿ���綯������ת������ֱ��
���ڵĵ綯���෴��ʹÿ���綯��������Եĵ綯������ƽ�⡣��ˣ���������UAV
������������Ŀ��Ϊż��(��һ�����ǽ�����һ������)�����磬������ֱ����
�ϣ������Ͷ��Ϸ���ĵ綯��˳ʱ��ת�������������Ϸ���ĵ綯������ʱ��ת��
(����ָ����ķ���)����������������֮������Ҫ������ֱ�������κη�����
��(����ƫ��)����Ҫ���ľ��Ǹı�綯��ij����ϵ��ٶȡ����磬Ҫ˳ʱ��ƫ
�������Ǿ����������Ͷ��Ϸ���綯����ת�١�һ���綯�����ơ�����һ���綯
�����������Ϳ���ʹ��������������Ҫ�ķ���ת�䡣
Ϊʲô���෴�ķ���
������Ѿ�ע������ǵ��������������ڵ���������ת�����෴����������
���ɺܳ�֡���һ����Ϊ�������ṩ�˵���ƽ�⡣�����ʹ��ȫ����һ��������ת
��������������������Ȼ�����Ǹ�������ת�����п������ͱ��벻�ϵ�����������
��������
���������������һ�ַ������о�ȫ�ߴ��ֱ��������ֱ�����Ϸ���ת������
����Ȼֻ��һ����������ת��β�����ṩ��ƽ�����������ֱ֤����ֱ��ǰ������
��ȥ������һ��ƽ��װ�ã�ֱ������Ȼ����У����ǽ��ڿ��в��ϵ�Χ����������
��ת��
2.1.2 ���������
ͼ2-1չʾ�����ǽ������漸��С���о��Ļ������͡�ע��ÿ����������������
����������ת����
����ֱ����
����ֱ�����dz�������ֱ������Ψһû�в���ż��������������ơ�����3����
��������������е�һ��(ͨ���Ǻ����һ��)����һ�����ϣ����ṩ��һ���Ƕ�
���������Ӷ�ʵ��ƫ��������ֱ����һ����3����������ͼ2-1 ��������ת����Ļ�������
����ֱ����
����ֱ���������ǵ��������е���ƣ����������ٵı�Ҫ����ṩ��Ļ�
е��ƣ�������4����������
����ֱ����
����ֱ��������һ�ַdz����е���ƣ�������Ϊ���߱���ǿ�ĸ���Я��������ͬʱ��Ȼ����һ���������ԡ����䱸6�����������������˵���˽�������Ƴ�
����ƽ������
����ֱ����
����ֱ��������Ƴ���������Ҫ�����غ�����Ҫ����ȵķ���������Ϊһ����
����8����������������ֱ�������κ�һ���綯�������������ֹ���ʱ���ܷ��С�
ʣ�µ�7���ƽ�װ�ý����ַ������ķ��У���������¹ʡ��������˵���˽�������
�Ƴ�����ƽ�ˡ���Y6
Y6�����ǵĵ�һ�֡����ᡱ���������ڻ�����3�����ۡ��ϰ�װ��6���綯����
������������ͨ����ÿ�������¶ѵ���ת�����෴��һ�Ե綯����������ʵ�ֵġ�
������ڳ����ij�Ʒ����ң��ֱ�����Ͽ�����������ơ�����������ͱ�����Ϊ��
��������Ч�ʱȴ�ͳ�ġ�ƽ�桱���Ҫ��20%��25%��
X8
��һ�����еĹ��������X8�����ֻ�����������ȥ����������ֱ����һģһ
������Ҫ�����X8��ÿ��������2�Ե綯������������ȫ������8����
2.1.3 ����
�ִ����˻�ʹ�����ͬ���͵IJ�����������Ϊ���е�ѡ�����̼��ά������
��ά�������ϻ������������õĴֹ���һ����������Ҫ�����Լ���Ϊ��
Ҫ�����Խ���Ȩ�⡣��������е���һ���ϻ����ԣ������ˡ�ǿ׳�������ɣ���ֻ
�ܵõ����е�������������̼��ά�Ȳ����кܸߵ�ǿ��(������)�����ǿ��ܷdz�
������ˣ������������ʱ���ȴ�ľ�ģ�������3D��ӡ�ı�ϩ��C����ϩ�C����ϩ
(ABS)�������֡������ڱ����н�Ҫ�����Ļ�����ΪLittle Dipper(С����)����Ҫ��G-10������ά�Ƴ�(��ͼ2-2)��������Ϊ���ֲ��Ϻܺõ�ƽ����������ǿ
�Ⱥͳɱ���
2.1.4 ����ƽ��
���������������һ�����͵Ļ���������ǰ������������ƽ�ⶼ�Ƿdz���Ҫ
�ġ�������ͷ��ʼ������ƣ����ֻ����ĶԳ���ȷ���������֮������ƽ��ĺ�
����������㲻�ò����ò���ô�ԳƵ���ƣ����Գ����ڻ����ϰڷ����������ʹ
�䱣��ƽ�⡣���˻��ĵ�����������°ڷ��Ա���ƽ��������ѡ��ͼ2-2 ����CNC�������и��G-10������ά����
2.2 ����������������
��С�������ǽ��յĿ��۵�����ֱ���������Ļ����������ӿ����ɣ��Ա��
��綯���Է��к�ͼ������Ӱ�졣�������ӿ�ֱܷ�������ɾ������
�͡��ࡱ��ܡ����ࡱ������·����ӿ�ܣ����������˶���������綯��������
�������ɾ�����ܴ����Ϸ����������з��к�ͨ�ŵ���װ�á�
���������ƽ�̣��ο�ͼ2-3�е���Ƭ��ʶ�����ǡ������Ƿֳ������ӿ�ܵ���
�����֡����A��B��ɡ��ࡱ���(A���£�B����)����C�����ɵ綯������������
4�����ˡ����D��E��F��ɡ��ɾ�����ܣ�D�Ǹɾ���ܵĵװ壻E�Ǹɾ���ܵĶ�
�壻F��������壬װ��������֮��(�ܿ콫����ϸ����)��ͼ2-3 ��Ļ�������Ӧ�ð�����Щ���
ʲô�ǡ��ɾ���
�á��ɾ����͡��ࡱ����������������������������֡����ǵ���˼�����ǿ�
������Ļ���������п���Ū�࣬����ָ������Щ�ӿ���йص����ۺܼ�
����һ���ӿ�������������˶���������������IJ�������һ���ӿ��������
�������������ͨ�������ܼ��������ӿ��֮��ĽӴ��������߸��롣���ڡ�С��
���������Ǹ������ĸ�С������ѹí��ĸ�����������ӿ��װ����һ����Ҳ����
����ѹí��ĸ���������ư汾����һ�����������ӿ�ܡ������ǵIJ����з�
�֣����ߵ��������������ˣ�������Ϊ����ѹí��ĸ�����;ã���ʹ��������
�����ǰ����ڻ������С�
����������ѡ��
���ǵ������á�С�������������������DZ�2-1���ṩ�˼��ֱ�ѡ�Ļ�������2-1 ��С���������������
QAV 250(��ͼ2-4)�ǵ����г������ܻ�ӭ�Ļ���֮һ�������ü�˫����
�ƣ���˼������ɣ�������ֱ���������зdz���Ч��
ͼ2-4 �䱸5��3̼��ά��������QAV 2502.3 ��������
�������㿪ʼ����ʱ��Ҫ�Ĺ���(��ͼ2-5)��
������ͨ�ð���(2.5mm)����һ��������õģ�������������һ���������н�
ʹ��2.5mm���֡�
������֣�����ǯ����732��ĸ���ӡ������κ�һ�ֶ����ԣ��������ʹ��
��ĸ���ӣ�һ��Ҫʹ��������Ӧ������Χ��С�ռ���ͺš�ȫ������Ͳ��ʹ�ã���Ϊ��̫���ˡ�����ǯ���ܻ������������»��ۣ�����ֻ����Ϊ�����ֶΡ�
ͼ2-5 ������������Ĺ���2.3.1 ��1������װѹí��ĸ��
���ȴӻ����ĵײ�(����)��ʼ�����̶��̵�����ѹí��ĸ��(��ͼ2-
6)���ҵ����ܶ���(ͼ2-3�е�B)�����ӵ�ÿ�����ϸ���һ��3mm��С��(��ͼ
2-7)����5mm����˿(���а����ĺ�ɫ����˿)������Щ���Ϲ̶�ѹí��ĸ����
���ֽ���˿����С�ף�Ȼ���ڰ����һ��̶�ѹí��ĸ������˿��Ӧ�ô�ѹí
��ĸ������һ�ഩ��(���������ʹ�õľ��Ǵ������˿)��4��ѹí��ĸ�����̶�
��֮��B�忴��ȥӦ����һ�������������ӣ�����������У���ͼ2-8��ʾ��
ͼ2-6 ѹí��ĸ���������Ƶĸ��Ը��á��������������ĸ�����á������ڷָ������ӿ��ͼ2-7 ָ������B���ϵ�ѹí��ĸ����װ��ͼ2-8 B���ϵ�4������ѹí��ĸ������װ��
����������ĸ�����
��ͼ2-8�У�B��ķ���������ķ����෴�����泯�ϡ�Ҳ����˵�����˻�����
����ӵ�ǰ����ͼ2-8����һ�ˡ�������������ָʾ���Ը���������һ�㣺���ȣ���
��ѹí��ĸ�����ϣ���Σ����ε����˰�װ��(�ܿ콫��ϸ����)ת��������ı�
�档��Ҳ���Դӽϳ�(���߽Ͽ���������Ĺ۲췽ʽ����)�����˰�װ�ױ�����
����ǰ����������ʱҪ��ס��Щָʾ��
>DroneKraft Mach300
�����������Mach300���������н��к�ͼ2-6�dz����Ƶ���ѹí��ĸ�������ܹ�Ϊ���п������ṩ�ܺõļ���
2.3.2 ��2������װ����
��4������(ͼ2-3�е�C��)�����ܵװ�(A��)������̶���һ�𣬱�����˻������°벿��(����)����ɺ��������ͼ2-9��ʾ��
ͼ2-9 ������A��B��C����װ����
�����һ�ΰ�װһ�����ˡ����Ƚ�A���B�����һ��B���ѹí��ĸ�����ϡ�
ȷ�����������ͬһ���������ͨ����λ���˿�(��ͼ2-10)��飬ȷ�������
�ϵİ�����С���롣���û�ж��룬�����ƶ�����һ�����(��ǰ����)��ֱ��
С���롣
Ϊʲô��ЩС���ǹ��εģ�
������Ѿ�ע���ͼ2-10����ʾ�����˰�װ����һ�������3mmԲ��һ����
�β���ɡ�������Ƶ�ԭ��ܼ���һ���ʹ���˿�������۵�����Ƹ�Ϊ��
�գ����ҿ��������¹��л��ͳ������������κ�һ����ǰ�Ķ������٣��۵�
�۽�����б�����̶��۸������۶ϡ�A���B���ϵ����˿�����ʶ��ǰ��װ����һ��3mm��Բ�ף�λ�þ���
3mm���β۵����Ϸ���ʹ��ܿ����۵���
ͼ2-10 �����˰�װ��(ע���۵������Ϸ���ê����)
���Ǽ��������ܶ����͵װ�(A���B��)֮���������(ͼ2-3�е�C��)����ͼ2-11��ʾ��>ֱ������
������м���ѹí��ĸ����Ϊ���ڸɾ���ܺ�����֮���������������
Ӧ�������ܶ���(B��)�Ķ�����
ͼ2-11 �����˶��룬�����뵽���ܶ���͵װ�֮��
���ڣ������һ�����ˣ������ζ˵�����3mmС�������˰�װ���롣��12mm��װ��˿(���а����ij���˿)���������һ��ƽ����Ƥ��Ȧ�����ڣ��ֹ�����
����˿�͵�Ȧ���������е�һ�����˰�װ�ף�Ȼ�����ˣ�����װ塣����
�����3mm�Ĺ��ο�ʼ��һ����˿������������ӣ�����һ�˷���һ��ƽ����Ƥ��
Ȧ������ڵײ�����һ��3mm������ĸ�������˵ĵڶ���С�����ظ���һ����(��ͼ
2-12��ͼ2-13)����װһ������֮�����������ظ�ȫ�����衣
��Ҫ����ĸ����̫��
����ܺ��������˰�װ��˿�ϵ���ĸ���ù������ⲻ������κ��ƻ�������
����ֹ�����۵���Ӧ�ý��������������������ι̵ع̶����ˣ������ֲ��ܹ�����
ʹ����ȫ���۵����ڽ�����һ��ʱ�����۵����ˡ�����ʹ�õ���ĸ��Ϊ������
ĸ�������Ƶ������һ����������ʹ����������Ҳ�ܽ���̶��ں��ʵ�λ�á��ڷ�
�����Ķ��ڼ���У�����ȻӦ�ÿ��Ǽ�鰲װ��˿����ĸ���ɽ��ȡ�
>Blackout Mini Spider Hex
�������������Blackout Spider Hex���������˽��Էdz����Ƶķ�ʽ��װ�ڵ�
���ϡ��㽫��������Ҫ����ǣ�ʹ���ĸ���˿��������������������Ҳ�����۵���
�����ڡ�ͼ2-12 ���ڶ�����˿���밲װ��ͼ2-13 �ڿ�ܵײ�������ĸ
2.3.3 ��3������װ�ɾ����
�����������ǽ������ɾ���ܡ���������ͼ2-3�е�D��E��F��(���ǽ��ڱ�
��������)��ɡ����ǻ���ʹ�����а�����8��37mmѹí��ĸ���������˼·
�ǣ�ʹ��D���E��ֱ���Ϊ��ܵĶ���͵װ壬��ѹí��ĸ�������ǹ̶���һ��
���������ҵ�D�塣���ע����ڰ��Ե��Χ��8��3mmֱ����С�ף������ǵ�
ѹí��ĸ����װ�ס�ȡһ����ɫ��5mm��˿(���а����Ķ���˿)���ֹ����䴩��
����һ��С��(��ͼ2-14)��ѡ����һ���ײ�����Ҫ����Ϊ���ǽ������а�װ����
����ͬ�Ķ�������Щ��˿����Ҫ��Ȧ��
��������ȡһ��37mmѹí��ĸ��������������˿��D����һ��ͻ���IJ���(��ͼ
2-15��ͼ2-16)����������֮�����ð��֡�����ֻ���ǯ�ӽ�һ��������ͼ2-14 ��5mm��˿����D���ϵ�ѹí��ĸ����װ��ͼ2-15 ����һ��37mmѹí��ĸ��������װ��˿����
ͼ2-16 ���ǵĵ�һ��ѹí��ĸ���Ѿ���װ��(�����Ҳ��������)���ڣ����ǿ��Զ�����37mmѹí��ĸ���ظ���Щ����(��ͼ2-17)��ȫ�����
֮��D��Ӧ����ͼ2-18��ʾ��
ͼ2-17 ����D���ϵ����һ��37mmѹí��ĸ��ͼ2-18 D���ϵ�����37mmѹí��ĸ���Ѿ���װ�ã�ΪE��İ�װ��������
���������Ѿ���D���ϰ�װ��37mmѹí��ĸ����Ϊ�̶�E�����������������
û�����һ�����ҵ����壬��ϸ�۲졣�㽫ע�������Ҫ����������ȣ����
��Ե(��D��һ��)��Χ��8����ȫ��ͬ�İ�װ�ף���Σ��������һ������������
(��D��һ��)����E�������װ�õ���������棬ȷ������������װ����������
���룬Ӧ��������ͼ2-19��ʾ�������
ͼ2-19 �ڼ��밲װ��˿֮ǰ����E�������װ�õİ��Ϸ�
������Ѿ��µ���������Ҫ������5mm��װ��˿����E���С����ѹí��ĸ��(��ͼ2-20)�����ȣ��ֹ�����˿���밲װ�ף�Ȼ����2.5mm��������(��ͼ2-
21)��
ͼ2-20 ����һ����װ��˿����E�����37mmѹí��ĸ��ͼ2-21 ����������˿֮��ȷ�����Ƕ��������Ͻ�
>Lumenier QAV250
�����ʹ��QAV 250�������ͻ�ע����������İ�װ��ʽ���������ǵĸɾ���
�ܡ���Ҫ����ǣ�QAV�����˹̶������˰��ϣ�ֻʹ��6��ѹí��ĸ���ָ�������
�ܡ��⽫ʹ�������ᣬ�ʺ��ھ�����Ӧ�á�
�ɵ�Ư��!���Ѿ������������ӿ�ܵĻ������֣����һ�а��ռƻ����У���
������Ӧ����ͼ2-22��ʾ�����������ڿ�ʼ�е�������ֱ�����������ˣ���˵�أ�
>�Ӽ�����˵�����Ǵ�ʱ����ֹͣ�������������������ӿ���϶���Ҫ��װ
һЩ����װ��(��һ���н�������)������������ܻ�δ������һ��ʱҪ����
�ࡣ������ˣ��������ڽ�չʾ���������������(��ʵ���Ϻܼ�)���ں���
���½��н�����ʱ������Բο������е�˵����ͼ2-22 ���ǵ������ӿ�ܶ��Ѿ���װ�ã�Ϊװ�ط��������������
2.3.4 ��4�������������ӿ��
�ٴ����꣺�������������һ����Ӧ���ڵ�2�½���֮ǰ���С����DZ���������
�ӿ���ϰ�װ����װ�ã���һ��Ӧ�ñ�������4�½���ʱ���С���Ϊ��һ���ܼ�Ϊ�������ԣ����ǽ��ڴ�չʾ������Իع˱��»���ƾ��������(�������Ŀ���
�Ը���)��
���ȣ����ɾ���ܷ�������֮�ϡ����ɾ���ܵײ����ĸ�Сͻ��(�м���3mm
��С��)�����ܶ���ͻ�����ĸ���ѹí��ĸ�����롣ȷ���������ָ����ͬ��
���������ȷ�����ɾ���ܺ�����ѹí��ĸ����װ��˿֮�����������ۣ���
���ܵ������۵�ʱָ���ܺ�
��������ܵ�����֮���ֹ������һ��5mm��װ��˿�����ɾ����ͻƬ�ϵ�С
�ף�Ȼ����2.5mm�������������ĸ�ͻƬ�ϵ�С���ظ���һ���̡���ɺ�������ͼ
2-23��ʾ��ͼ2-23 ����˿������װͻƬ(�ڸɾ������)
���´������Ѿ��������ӿ������������������ף�������
����ͷ�����ô������
����������Ķ�����(�����ڿ�˭����Ц����Ȼ������!)���ͻ�ע�����
��û���õ�����һ��壺F�壬Ҳ����������塣�⽫�ڱ����Ժ������һ��
װ����������ڵ�8�������ۣ����Ǿ���������ϸ���������������úͰ�װ��������ó��ϡ�
>�ۿ�������Ƶ
����Է��ʱ���������վ(http:gettingstartedwithdro-
nes.comlittle-dipper-build)���ҵ�һ����ϸ����Ƶ��չʾ�������в������
�����ߵijɹ���
��3�� ����ϵͳ
����ϵͳ�Dz�����������ij�ַ�ʽ���ݶ����Բ����ƶ���һ�������������
�У��������������������ݸ�������������ͨ������ϵͳ���ݶ�������ݵ���
����ʹ�����ƶ������ǵ�����ֱ����Ҳ��һ������ϵͳ������������ת�����ھ���
��������һ����Щ�����
3.1 ������
��õ��������յ㡪����������������ͨ����������������ϵͳ�е���̥��
������̥��ץס·�桱ʹ�����ƶ�����������ץס���������ƶ����˻�����������
��̥���ƣ��������и��ֲ�ͬ����״�ʹ�С��Ӧ�ø��ݴ���ϵͳ���������ǵ�����
������ѡ��ѡ��������ʱ��Ӧ��ע��Ĺ����3�֣����ߴ���ݾࡣ
3.1.1 ����
��ϸ�۲����е���������ע�������������ֲ�ͬ�����Σ��ݾ���෴����Ҳ
��ζ����Щ����������ת�����෴��ÿ�����͵�������������ʽ�����ƣ��ֱ�����
��ʽ����������ǣ��ʽ���������ƽ���������ʱ�������ֲ�������������ʱ����ת
ʱ����������ǣ����������ʱ�������ֲ�����������˳ʱ����תʱ��������������
������һ���������ַɻ���ƽ���ˮƽ��������潫����ϸ���������ǵĹ���ԭ
����
�ƽ�ʽ�������ƽ�ʽ�������ĵ�������Ϊ����ԭ����Ϊ���ú��õ綯���ķɻ���Ƶ�(����
���ֵܵĵ�һ�ܷɻ�)�������������Ӻ����ƶ��ɻ��������Ǵ�ǰ����ҷ�����ͧ
�е��ƽ���ʽ�dz����ơ�
3.1.2 �ߴ���ݾ�
��������������һ��ֱ�Ӱ�װ�ڵ綯���ϵĽ�챣��ӽ�������������(��ʱ
����)ҶƬ���������ijߴ綨��ܼ�������ҶƬ���������ϣ��ߴ���ҶƬ����
֮��ľ���(Ӣ��Ϊ��λ)���������ڡ�С������������5��6Ӣ�������������
�룬������Щ���˻�����ʹ��29Ӣ��(��������)��������!
�ݾ�Ľ���������һЩ�����˴������Ϊ������������ƽ��֮��Ľ�
�ȡ�ʵ���ϣ��ݾ����������ھ�����������ʱ��һ����ת��ǰ�ƶ��ľ��롣��һ��
ľ��˿�ϵ����ƣ�����ֲڵ����ƣ���ϸ��������һ����ת���ƶ��ľ������һ
Щ���������Ĺ�����ʽ�����ȫ��ͬ���ɻ�ǰ�����߿�ͧβ��(��������)������
���ݾ�Խ��һ����ת��ǰ���ľ����Խ�ʹ�����һ�����ݾ�Խ���������Խ
����ת����
��ϸ��������������˱���ķ�Χ����������Ҫ˵��������ʵ�����к�����
�����������ݾ�(��ͼ3-1)���������Ļ���������ɻ���Ӧ���ƶ��ľ����ʵ����
���ľ���֮��IJ��졣����Դ˸���Ȥ����һ���������������վ���зḻ��֪
ʶ��ͼ3-1 �����Ǽ����ݾ����Ч�ݾ�֮��IJ�ֵ
�ݾ�Խ��ÿ����תʱ�����������Ŀ���Խ�ࡣͨ������������ɸ��ߵ�����
ˮƽ�������ķ�������Ҫ�������������Ǻܺõģ�����Ҫע�⣬������Ч����
������Ϊ�������ĵ綯����Ҫ��������(��ص���)����ת�����ݾ����������ѡ
����ݾ�����������ܻ�����������ʱ�䣬���ǻ�ø��������Ĵ��ۡ�
�������и��ֳߴ���ݾ����ϣ�ÿ����϶��������ס���Щ���Ч�ʽϸߣ���������������������ͨ�����ݾ�Խ��(����������Խ��)������������Խ��
�����ķ��������أ�������Ҫ���ٷ��У���ô���ݾ���ߴ�ߴ���������Ƚ���
�롣���ǣ������Ҫ�����������·��и�����ʱ�䣬����ݾ���ͺ���Ϊ���ʡ���
���������д��۵ģ��Ǿ���������������Ч�ʡ�
�ߴ���ݾ���ͨ��ӡ��������������챵�һ��(��ͼ3-2)����0845P����
08X4.5P��ǰ�������ֱ�ʾ�ߴ硪��8Ӣ�磬Ȼ�����ݾ��4.5�㡣P��ʾ�ƽ�ʽ����
������Щ��˾���ƽ�ʽ�������������ֲ������������ƿ��ܱ��ΪL����R������P��
ǣ��ʽ��������ĩβû������ĸ���棬���Ǽ�����Ϊ0845��
ͼ3-2 �����ƽ�ʽ������������ǣ��ʽ������Ч�����������
�����ڡ�С�������Ͻ�ʹ��6Ӣ���3Ӣ����������������������ĺô������
���6Ӣ����ƿ����ṩ����Ķ�������3����ݾ�����нϸߵ�Ч�ʡ��������ͼ
�õ�������ٶȣ����Գ��Խϴ���ݾ࣬��6Ӣ���4.5Ӣ�硣��ס���ݾ��Խ��ͨ���������Ŀ���Խ�࣬���۾�����Ҫ�ķѸ���ĵ�ص�����
3.1.3 ƽ��
�����ڴ��ֽ���̥�����������Ტ�ۡ�������̥��Ҫƽ������ڸ�����˳����
������������Ҳ����ˡ�����һ�����ܵĹ��̣��κΰ����߶��������ա�����ƽ��
������ʱ��һ��Ҫȷ����������ÿ��ҶƬӵ����ͬ�������������ڸ�����תʱ����
������
ƽ����ܼ�����Ҫƽ�����������װ��һ��������ת�����ϡ�����ת��
����ͨ�����ͬ�ķ���ʵ�֡���һ�������˴�����������װ�����룬��������
������������֮�䣬ʹ����ԴӼ���û��Ħ������ת������ת��Ħ������ȱʧʹ��
�����ϵ��κ��ص㶼������������������������ת��
����������ȫ��ֹ�ģ�������ij��������б����ʹ����һ��������ȷ������
���е��ص㣬���ǿ���Ϊ���һ�����ػ��ߴ��ص�һ����ء���ס����Щ����ͨ��
��С��������������ֻ�Dz���С������������ֽ��������ͨ����ɰֽ���Ĵ�ĥʵ
�֡���ȫƽ��ʱ��������Ӧ�����ƶ����κ�λ��ʱ�����Ա�������ҶƬ����������
���档
�������һ��������ƽ�������뷨̫�����ˣ���Ҫ���ġ���ҹ�˾���и�����
״�ʹ�С��ƽ������Ʒ������ʹ�õ��ͺ���ͼ3-3��ʾ��ֻҪ�����ң�طɻ�����һ
��������ͼ3-3 ��ȫƽ��ʱ��������Ӧ�ÿ���ͣ��ƽ�����е��κ�λ�ö�������ij��������
�ִ�������������ʱ�ͼ�����ȫƽ�⣬�����Լ����ָ���һ������һ������
�⡣ͨ����������������Խ�ã�����ʱԽ����ƽ�⡣���˵����������ܽ�ԼһЩ
Ǯ�������㲻�ò���ʱ���Լ�����ƽ�⡣
ƽ����Ƶ
��Ȼ�����ƽ��������û�а��գ���ô��������һ����Ƶ
(http:gettingstartedwithdrones.comprops)������˵�����һ��һ������
���������
3.2 �綯��
����ֱ��������ϵͳ����������ϵͳ����Ҫ���֮һ�ǣ�����ʹ����ֱ������
ϵͳ���DZ��������������У���Ҫ�Ķ�����Դ������������ӵķ��������������������ֲ�����Ҫ�ij����ϡ���ֱ������ϵͳ�У�ÿ������(����������)ֱ������
������Դ�ϡ��������ǵ�����ֱ����������Դ����ˢ�綯����
3.2.1 �ߴ�
��ҵ��ʹ�õ��ִ���ˢ�綯���е綯����ǵĿ��Ⱥ߶ȱ�ʶ(��ͼ3-
4)��2216�綯���Ŀ���Ϊ22mm���߶�Ϊ16mm����Ȼ��������ÿ�ҹ�˾��������ͬ
���������������ڿ��ܵ�����£��ο���������һ�������⡣
3.2.2 �KVֵ
���������ˢ�綯�������Ͽ�������һ�����ָ����KVֵ�����ֵ�������ǣ�Ϊ�綯����Ӧ1V��ѹʱ��ת��(rmin)����һָ�����ڵ綯������Ϊ0ʱ��õģ�����ʵ�ʵ�ת�ٽ���Ħ�������ر仯���仯�����ڣ����Խ���һ�ֵ�������
��ѹ��ת�ٵı�������ص�ѹԽ�ߣ��綯����ת��Խ�죬���ǶKVֵ��Ȼ��ͬ��
ͼ3-4 ��Щ2204�綯���ĶKVֵΪ2300���ɴ���5Ӣ���6Ӣ���������ת�ٵļ���
�KVֵΪ900�ĵ綯��ʹ��12V���ʱ��������״̬����ת�ٶ�Ϊ
10800rmin(12��900)��ͬ���ĵ綯��ʹ�ø���ĵ��(16.8V)ʱ��ת�ٶȽ�Ϊ
15120rmin��
3.2.3 ������ʵ�������
���ݴ������������ÿ���綯��������ˮƽ��������ͬ��������ͨ������Ҫ��
�⣬��Ϊ�ֵ綯�������̶��ṫ���綯�����Ƽ����������Ϊ��ȷ����ȷ��
�����������Ӧ���˽����˻����ʱ�����������ƻ����������˻�Խ�أ���Ӧ��
���������̵Ľ���ѡ��������������
3.3 ������
�ڵ綯����������������У��㳣����������������������ָ����ʵ��Ӧ
���е綯����������ϲ�����������������ͨ���Ա�ʾ���żӵ����ʱ����������
������ֵ���(�������̶����ṩ��һ��Ϣ)�������ڡ�С��������ʹ�õ�
2204�綯����6Ӣ���3Ӣ��������������Բ���539�˵�������������ı�������������ֵҲ���ı䡣��Ȼ����һָ���Ƕ�ÿ�ֵ綯�������������������ġ�Ҫ������
��ֱ���������������Խ���Ľ������ֱ����������(��������ֱ������4)����
�ڡ�С�������������2156��(4��539��)������!
���㸺������
����������ÿλUAV����߶����붨��Ĺ��֮һ�����Ƿ����������������ȫ
��(All Up Weight��AUW)�IJ�ֵ��AUW�Ƿ�����Ϊ��������װ�����֮��������������綯��������顢��������豸�����������ڣ������Ѿ�֪����μ�������
�������Լ���������������������AUW��ȷ���������ĸ���������
3.3.1 �����ٶȿ�����
�����ٶȿ�����(Electronic Speed Controller��ESC)�����ڶ���������
��ֱ������ÿ���綯���ٶ��뷽���С�͵�·�����ǵķ������ϰ�װ��4��ESC��ÿ������רΪ��ˢ�綯������Ƶġ����ǽ������������ĵ���ת��Ϊ�����ź���
�У�ͨ��3����ͬ�ĵ��߷�����ˢ�綯�����ź����п����ٶȡ���ת�����綯����
�ƶ����ܡ�ÿ���綯������Ҫ���ٶȴӷ��п��������ݸ�ÿ��ESC�����ǽ�����һС
�ڸ���ϸ�ؽ��ܡ�
���ࣺ�������ѹ
����ESCʱͨ��Ҫ�鿴������Ҫ�Ĺ�����͵�ѹ��ESC�Ķ��ѹֵ������
�ڸ�ESC�ĵ�ش�С(���ǽ���3.3.2�ڸ���������۵��)�����ڣ����ǽ���ָ
����������ʾ�����Ƕ��ѹ12.6V����о��ء��㻹�ǵ�����������ʱ�ᵽ�ĵ綯
�������𣿹�����ͨ��Ҳ������AΪ��λ�ĵ������������Ϣ����ȷ����ָ����
��������������Ҫ�����ͺŵ�ESC��
SimonK�̼�
����ҵ�����˻���ESC�����������������ߵ�ң�طɻ������������ܵij���
�У�RC���������ɡ��Ʊȿ�����һ��ҵ�༶��ESC�Ŀ�Դ�̼�������̼���ǡ���س�
ΪSimonK�̼�����������Ϊ�綯���ṩ�˸������Ӧʱ�䣬�������˷���������
���ԡ�������ESC���������ڶ��ṩרΪ���������������SimonK ESC(��ͼ
3-5)��
ͼ3-5 ������ʾ����ʹ�õ�ESC�����Ϊ12A������ѹΪ16.8V(4S���)
3.3.2 ����
�Ե����������˻��������а�������Ҫ����֮һ����﮾ۺ���(Li-Po)��ء�
���ֻ���غ����ƣ�����һ��������(NiCD)������(NiMH)�����ȣ�﮾ۺ���
����и���������C�����ȡ���Լ��������UAV���յĹؼ��������͵�ѹ
���ִ�﮾ۺ����ض��Ǹ��������͵�ѹ����ġ�����﮾ۺ����ض���
ͨ��������ص�Ԫ�ڲ�����һ���С�ĵ��о�ﵽ���յ�ѹ�ġ�ÿ�����о�Ķ
��ѹΪ3.7V(������Ϊ4.2V)������ζ�ţ���������ʾ�IJ�Ʒ��ʹ�õ�3о��ض�
����ѹΪ11.1V(3��3.7V)�����������Դﵽ12.6V(3��4.2V)��
�����ļ�����λ�ǰ�ʱ(A��h)����˵������ijһ�����µ���ܹ������ʱ����
10A��h��ؿ���Ϊ1A���豸����10h��ͬ���ĵ����5A������ֻ�ܹ����Լ2h������
ʹ�õ����е�ض���һ����ĺ���ʱ(mA��h)ֵȷ������(��ͼ3-6)�������
Ϊ2200mA��h�ĵ����������1500mA��h�ĵ�ء������ϣ������صĹ���ʱ���
1500mA��h�ĵ�س�30%���ϣ����ǣ���ʵ�ʷ����п��ܲ�����ˡ�2200mA��h��ص�
��������1500mA��h��أ���Ҳ����ζ������ֱ����������Ҫ���Ѹ���ĵ���������
��ʼ���ն���������һ���ƽ�⡣
��Ȼ﮾ۺ����ؼ��������ǰ��ã�����������Ȼ��ijЩ���㡣��һЩ���
�£����ֵ�ػ��ò��ȶ��������������!
��ˣ���ʹ��﮾ۺ�����ʱӦ��ʼ�ձ��ֽ����������ĵ�أ�����Ҫʹ
��������ĵ�أ���������ȡ��֮��!�ڳ��ʱҪʹ�÷��������ƽ��һ�������
���ӵ��������Ȼ��ط��������������ܵط�����Χ�Ŀ��ڡ��������е�
�������һ�������⡣
ͼ3-6 2200mA��h3о�����
���������������鷨���ǣ�����Ҫ����ĵ�طŵ絽����ÿо3.2V������ζ�Ŷ���ÿ��3о��
�أ��ŵ絽����9.6V����������Ƿ��֣�����ÿо3.5V����3.4V�ľ����ߣ���
�����������㹻�ġ�ȼ�͡�(Լ20%)��½��ʹ��ش��ںõ�״̬�����ң�Ҫ���ⴢ
�������ĵ�ء��ֺϸ�ij��������һ���������ã�����������ʹ��شﵽ
ÿо3.8V��ˮƽ�����ܹ������ӳ���ص�������
3.4 ��������
�ⲿ�ֵ�������Ҫ���²���(��ͼ3-7)��
�������ͺ���
��Helping Hands���������о�ϵͳ
���ȷ�ǹ
��12��(����ĸ)2mm������ͷ
����Ӣ�糤��18Ӣ��������
����ǯ�����ǯ
��ͨ�ð���
��С�����ߴ�
��˫�潺��
������ͼ3-7 ������Ҫ�IJ��Ͽ��治��
3.4.1 ��1������װ����
������Ҫ���ĵ�һ�������������Ϲ̶�PDB��λ�á���������ʱ�������÷�
ͭ��G-10����PDB(��ͼ3-8��ͼ3-9)�������г��ϻ����������Ҫ������۰�
�������PDB�dz��ʺ���װ�����ǵ��������롣���ȣ���PDB�ı���ճ��һС��˫
�潺(��ͼ3-10)��ͼ3-8 �ɷ�ͭG-10�и���ɵ�DIY����ͼ3-9 �������ǵ�PDB��ۡ��������ڼ�������Ϳ�Ϻ���������Һ�彺����Ϊ��Ե��ͼ3-10 ��PDB�ı���ճ��˫�潺
���ڣ���PDB��ѹ�����ܵ�����λ�ã�ʹ��ؽ��ߡ�ESC��������Ҫ��Դ��Ԫ
����������������(��ͼ3-11)�������Ҫ����˿�ӹ̣�����������һ��3mm��С
�ס����Ƿ��֣�˫�潺�ܺõع̶���PDB�����ѡ��ʹ����˿����������Ҫʹ��
��˿�����Գ���ʹ��С��������˿����ĸ���������Խ�Լ���������Ҳ����Ϊ���塣
ͼ3-11 ��PDBѹ����λ
3.4.2 ��2�������Ӳ�����ͷ
��һ���ǿ�ѡ�ģ����ǿ���ʹ��װ������ø������ɡ�������ͷʹ����Խ�ESC
�͵綯�������������߶Ͽ���������Ҫֱ�ӽ����Ǻ�����һ��ʹ�����ַ����ĺ�
����������ά��������������ȱ�����ǿ�����Ϊ��ͷ��������ֹ��ϡ��������
��ͷ�����ܵ�������ֱ������(4���綯���е�һ��ͣת������ʯͷһ������
��)��֪������Щ���ף���Ϳ�������Ϊʲô���������ӷ�ʽ��˵����ˡ����ǽ�
�����Լ������Ƿ�ʹ�ò�����ͷ�����DZ���ٶ��û���װ���ֽ�ͷ�����������ʹ
�����ǣ����ǽ���ֱ�Ӻ��ӣ������������ܷ⡣�ڼ�������֮ǰ��һ��Ҫȷ������
��ȷ!
ȡ���о߲�������������������!�͵����ϼ������н�ͷһ����������ͷҲ��һ�Խ�ͷ��ɣ�һ��ĸ��ͷ��һ��
����ͷ�����ǽ�����ͷ��װ�ڵ綯���ϣ�ĸ��ͷ��װ��ESC�ϡ��ⱻ��Ϊ����õ���
������ΪESC��һ�˿����ṩ��Դ��ĸ��ͷ��û�в����κ��豸ʱ�����ṩ���α�
����
��4���綯���е�һ����ʼ����3���綯���������ϰ�ȥ��Լ18Ӣ��ľ�Ե�㡣
���������������ϼ�����������Ϳ�ڵ綯�������ߵ��ⲿ(��ͼ3-12)��
ͼ3-12 ��ȥ�綯�������ߵľ�Ե�㣬�����������Ϲ���ͷ
��һ�κ��ӣ�
�������Ķ�����һ����Make��ϵ�д��飬�������Ǽٶ����ȥ�Ѿ��ù�����
��������ֻ�ù�һ�Σ�Ҳ����ÿ�춼ʹ�ã����Ǽٶ�����乤��ԭ���л�������
�⡣�������һ������ȫİ��������ϣ����ϰһ�£�������
http:gettingstartedwithdrones.comsoldering��ҳ�ϲ�����ϸ�ĺ��ӽ̡̳�
�����������ǽ�ʹ�üоߣ�Ϊ�綯�����������ӹ��Ͳ�����ͷ����������ͷ��
������һ��������ϣ������Ϻ����ĵ綯������������һ��������ϡ���ʱ��ȷ
����������������������λ���ϣ��Ա�������ɵز�����������һ���������Ҫ
���������ã����������ڲ�����ͷ��Χ����������֮���ڽ�ͷ�ڵ������ڵ�λ��
�ϵ�һЩ������������Ϣ�μ�ͼ3-13��ͼ3-13 ����Ԫ�����Ѿ�λ�������Ѿ����ú��ӵ�һ����ͷ����
ʹ��������������Ҫ���������һ��������ͷ��һ�˽ӽ��������ƿ������ͺ�
�����ý�ͷ��ȴƬ�̣�Ȼ��Ӽо���ȡ��(��ͼ3-14)��
ף����!���Ѿ�����˱�������Ŀ�еĵ�һ�κ���!�о�����ϣ����ˣ���
Ϊ�㻹�кܶ�����Ҫ���������Ǽ�����!
������ȴ֮�Ӽо����ƿ��綯�������ߺͲ�����ͷ���ظ��������裬����
���������綯�������ߺͲ�����ͷ����һ���綯�����֮��ʣ�µ�3���綯����
����Щ���衣���ʱ��4���綯����ȫ����������Ӧ�ú�����12�����Ͳ�����ͷ(ÿ
��������1��)��ͼ3-14 ���ǵĺ����ڼо�����ȴ
������ʱ��Ϊ��ͷ���Ͼ�Ե���ˡ���һ����Ҫ18Ӣ�������ܺ��ȷ�ǹ(���û
�еĻ������ô����)������3��0.5Ӣ��������ܣ����ɵ������º��IJ�����ͷ
�ϡ�������Ӧ�����ڽ�ͷ����ͻ��IJ��֣���Ϊ���Ͳ�ͷ��ǰ�˽��嵽ĸ�Ͳ�����
(��ͼ3-15)��������ǵ��������谭�����ӣ������γɲ��ɿ��IJ��������Խ���
�Ͳ�ͷ��ĸ�Ͳ������Ӽ��Σ���������λ�á��⽫��������õ�����������Ӧ�÷�
�����Ӽ��ϵ��ĸ�λ��(����Ҫ���ǣ���Ӧ�÷����ĸ�λ��)��ͼ3-15 �����ܾ�λ���ȴ��ȷ�ǹ����
����������֮�������ȷ�ǹ�����ǽ��º͵�Ϊ�����ܼ���(��ͼ3-16)��
�������źã��Ա�ÿ�μ���һ�����ر����������һ���̻�����Ϥ������¡����
ʹ�õĴ���������ȷ�ǹ�ķ����ϴ�һ��ҪС�ģ���Ҫ���ȷ紵�����㾫�Ķ�λ
�������ܡ���ȫ��3��������Ӧ����һ���̣�����Ӧ�õõ���ͼ3-17��ʾ�Ľ������
���ܵ�����ֻ��Ҫ���Ѽ����ӡ�һ������������ס��ͷ�͵��ߣ��Ϳ��Լ��������
�����ˡ�ͼ3-16 ʹ���ȷ�ǹ���þ�Ե�õ�����������
ͼ3-17 ��Ʒ�������ڿ�ʼ��������Ľ�չ����ʱ��4���綯����ÿ�������߶��Ͳ�����ͷ��
�̵غ�������һ�𣬲���С�ĵ��������ܾ�Ե�����ڣ�������ESC�ϵ�ĸ�ͽ�ͷ����
ͬ���IJ����ˡ������㹺���ESC�ͺţ���Щ�����Ѿ������˲�����ͷ������Ѿ���
�˽�ͷ����������Ƿ�����Ĺ��͵綯����ͷƥ�䡣�������������������������
�IJ��衣
�͵綯��һ�����ҵ�ESC������3����ɫ����(�����ŷ�ϵͳ�IJ�ͷ������ԭʼ
�ĵ���)����ȥ0.125Ӣ�糤�ľ�Ե�㣬�����ӡ����ӵIJ���͵綯��һ����Ψһ
�IJ�֮ͬ������κ��ӵ���ĸ�ͽ�ͷ(��ͼ3-18)������㻹û����ͷ�����γɸ�
��ٹ̵�ӡ����ô�ͷ����ظ�ǰ��IJ��衣
ͼ3-18 ���ӵ�һ��ĸ�Ͳ�����ͷ
�������н�ͷ�����þ�Ե��֮��������һ�¹��ͽ�ͷ��ĸ�ͽ�ͷ��Ҫ��Ե
���ֵIJ�𡣹��ͽ�ͷ�õ���0.5Ӣ�糤�������ܣ�ĸ�ͽ�ͷ����Ҫ1Ӣ����߸���
(��ͼ3-19)�������ܲ�Ӧ������ͷ�ļ�ˣ���һ�����ӳ�������֮�ϡ���ס��������������ʱ�������Σ������ڼ���ʱ�����ܴӽ�ͷ�ı�Ե������ͨ������
������������ͷһ���λ�ã�����������֮����֮���롣����������ַ�������
������������Ե�������õ�ƬС�ĵظ���谭�ȹ����ӵIJ���(��ͼ3-20)��
ͼ3-19 һ��ҪΪĸ�ͽ�ͷ�и���ʳ��ȵ�������ͼ3-20 ������֮��һ�п���ȥ���dz�����
��ʱ�������Ѿ�Ϊ4���綯�������˹��Ͳ�����ͷ��Ϊ4��ESC������ĸ�Ͳ�����
ͷ�������û����ɣ��������Խ����Dz���һ�𣬿����Ƿ�ƥ��(��ͼ3-21)��ͼ3-21 �ɹ���һ�ж�ǡ���ô�
̫�����ˡ��������ڽ�����ϵͳ��װ�����˻��ϡ���ʱ������������������
�飬��������һ����ϲ���ĵ��İɣ�������Ӧ�õĽ���!
3.4.3 ��3������װ�ٶȿ�����
�����ٶȿ�����ͨ�������ְ�װ��ʽ���ڿ���ϰ�װ�������ڿ�������������
���ϰ�װ���Ա�������������������еõ������ɢ�ȡ���Ϊ���ǵ������������
�����ǿ����۵��ģ��������ǽ��ٶȿ�������װ�������ڲ�����װʹ��˫�潺
��������Լ0.5Ӣ�����һС����������ESC��һ��(��ͼ3-22��ͼ3-23)�����
ESC�������Ƿ�ͬ��ƽ̹����ʱ��ESC��һ�������һ��ͻ����Բ�δ���ݣ����
�㷢�����������������������һ�ಢ���������ճ��һ�������������Եõ���
��ĸ��������ͼ3-22 ��ESC��ƽ̹��һ������һС��˫�潺��ͼ3-23 ��4��ESC�ظ�����
��ESC�����ý���֮�����潫������ӿ���С�����һ��ESC��ȷ�������ϵ�
���Dz��Ѿ�˺�£�����װ����������PDB��װλ�õ���Χ�ҵ�һ����λ��������
�������λ��Ϊ�ĸ����ޣ���ÿ��ESC�ŵ����Ե�λ�á���ESC������ĺ�ɫ�ͺ�ɫ
��Դ����Ӧ��ָ�������ģ�����һ����ʹ�õĺ�ɫ�綯��������ָ���ⲿ��ȷ��
ESC�ķ��ø߶����������������һ��ESC�����ͼ3-24��ͼ3-25��ͼ3-24 ��λESC��Ȼ����ѹ����λ��ȷ���·����㹻�Ŀռ������һ����Ԫͼ3-25 ������ESC��λʱ��Ӧ���籾ͼ��ʾ
3.4.4 ��4�������ӵ�Դ
��һ���Ǻ��ӵ�Դ����������ǽ�ÿ��ESC��������(�ֱ��Ǻ�ɫ�ͺ�ɫ��)��
�ӳ�һ��������·������㲻��Ϥ������·��Ҳû��ϵ������һ���ܼĸ���������к�ɫ��(����)������һ�����к�ɫ��(����)������һ��ͼ3-9���
��˵�������ֹ�����ʽ�����ǵĵ�·������һ��������ͨ·��һ�����ߵ�ͨ·����
��ESC������ص缫�������ӵ�PDB��
���Ǵ�һ��ESC��ʼ����Ϊ��һ�����ӡ�ȷ��ESC�������ĺ�ɫ����Ҫ�����
��Ч�ؽӴ�����Դ����(�����ǵ�������������ͨ·)�����ڣ�����������һ
����(�����Գ�һЩ���Է���һ)�����´���ͷ��ʼ��18Ӣ���Ե�㡣Ȼ������
������¶�ĵ��������������ӵ�PDB(��ͼ3-26)��ͼ3-26 ����һ��ESC��Դ��������Ȼ�����ӵ�PDB
����������֮��ȷ���������ļ�˸ɾ���Ȼ���ټ�����������������������
����ǯ��סESC���ߣ��̶���PDB��Ҫ���ӵ�λ�á�ȷ��������λ���Ƕ�Ӧ��PDB��
·���������ǵ�����������һ��Ҫ���������ĵ�·�ϡ�����������߷�������
ͷ��PDB֮����ȡ��������Ԫ���϶����㹻�ĺ���������Ӧ�ú����������Ϊһ
�塣�����һ�����ƿ������������ü���ǯ�̶��������ӡ������ע��۲캸
�����ͻῴ�����ڼ���֮�ھ���ȴ�ˣ���ʱ��Ӧ�ó�������ĥɰ����ۣ�������Һ
�����״��һ���ﵽ������Ч�����Ϳ����ƿ�����ǯ��������ӡ�������ӻ��Ǻ�
�ɣ��ظ���Ҫ�IJ��裬ֱ�������ι�(��ͼ3-27)��ͼ3-27 ���ǵĵ�һ�������Ѿ����ã������ƺ����ι�
��һ���������߾�λ֮��ͬһESC�ϵĸ����ظ�����ͬ���IJ��衣Ψһ��ͬ
���ǽ��������ӵ�PDB�ϵĸ�����·(�����ǵ����������Ҳ��ͨ·)����ͼ3-28
��ͼ3-29��ʾ��
�˲���!��ĵ�һ��ESC�Ѿ����ӵ�PDB��!���ڣ�������ESC������ͬ�Ĵ���
(��ͼ3-30)�����������������ESC�Ľ���λ�á���Ҫ����ؽ�������̫����
��Լ�ռ䡣�����������һ��������ͼ3-28 ���뺸��������ͬ�ķ�ʽ���Ӹ�����ȷ�����ӵ�������·����ͼ������ײ���ͨ·ͼ3-29 ���ǵĵ�һ��ESC�Ѿ������˴�PDB��ȡ��Դ����
���ǵĺ��ӹ�����������ˡ�����������Dz����������ˣ�ʣ�µ�Ψһ���ӹ�
��������������ߡ����ESC���ߵ����ӷ�ʽ��ͬ����ȥһ�˵ľ�Ե�㣬�������ü�
ǯ��ס�����ȡ�һ��Ҫ���ӵ���ȷ�ĵ�·������Ҫ�������ι̡�ͼ3-30 ���ǵĻ����е���һ�����ӣ���������ESC�Ѿ����ӵ�PDB
�����
���ڣ���ֻ�ڷ�������������ijһ������Ԫ�������ǣ�˭֪��δ������ô����
Ԥ�����üƻ�����PDB�����Ӷ�������õ�Դ�������ڽ������ܼ����Ԫ�������Ǻ�
�õ���������ͼ3-30�У����ע������Ѿ���ô���ˡ���������ĵ�Դ��·����
��һ��JST��Դ��(���ϻ������־�����)����������������ڸɾ���ܺ�����
֮�䡣������Ҫ�����豸(����Ƶ�����)ʱ������Ҫ���ľ��������Ǹ���ͷ����
���Դ��û�б�Ҫ�ٴ�ʹ��������!
3.4.5 ��5������װ��ˢ�綯��
��С������������С�����˻����õ���ˢ�綯�����ڲ��Ϸ�չ�������ǿ�ʼ��
д�����ʱ���г���ֻ�м����ͺţ����˶�ʹ�����ǡ������˼����£��ͳ�
���˼�ʮ���ͺţ������������ڲ������ӡ��������ֲ��ϱ仯�ľ��棬���Dz�����
ר�Ž���ij�������ͺţ����ǽ������������в�ͬ�ͺŵ�˼·���������ϰ�װ�綯���ĸ���dz����ҵ��綯���Դ��ĺ��ʳ��ȵİ�װ��˿
(�����ж��ֳ���)����������Բ���ϵİ�װ�ף�����綯���ײ����ݿס�����š
�����ֵ��Խǵ���˿�������������ϸ�����̥ʱһ����
ע�����Ʒ���!
ע�⣬�綯������һ���̶����������ᡣ����������ƣ�������ij���ʺϸ���
�Ƶ���ĸ(����֧����ĸ)����������ʩ��ѹ���������ڵ�С�����˻��ϣ�������
�ƶ��DZ���˳ʱ�����ơ���Ϊ���ǵĵ綯���ȿ�����˳ʱ�뷽����תҲ��������
ʱ�뷽����ת����������ʶ�����������б��ͷ������Ƶĵ綯��������������
��������ת�������Ͻ���ȷ�����������ת����ʼ��������������ת�����෴��
˳ʱ����ת�ĵ綯��Ӧ��ʹ�÷������Ƶ��ᣬ��ʱ��綯����ô��������
���ᡣ
ע�⣺���������������̶���ô����������������Ȼ�����е綯����ʹ�ñ�
���ơ�����Ȼ���Թ����úܺã�ֻ��һ��Ҫȷ���Ͻ��������ڼ��(������ζ�Ҫ
��ô��)��
������λ���Ԣ���ǣ�ʼ��Ҫ֪���綯������������ͣ�ȷ����װ����ȷ��λ
�á������Ҫȷ�ϵ綯����ת�ķ���Ҫ�ڹ̶���������֮ǰ��ɡ���������
�ġ�С���������ڶ��������Ϸ���ĵ綯����˳ʱ����ת���������Ͷ��Ϸ���ĵ�
������ʱ����ת��
��װ���̵ĵ�һ���ǽ��綯��ƽ��������֮�ϣ������˵ײ��İ�װ����綯��
�ײ������ƿ���(��ͼ3-31)��ȷ����������Ʒ������Ԥ�Ƶĵ綯����ת����
��˵����ȷ�ġ��������Ӧ��˳�����˵ķ���ȷ�����Dz����������������졣ͼ3-31 ���ǵĵ綯��ƽ�������������̶�
�����ֶ�����һ����˿�������˵ĵ綯����װ�ף�����綯���ײ������ƿס�
���֮����Խǵ���˿��ֱ��4����˿ȫ����λ(��ͼ3-32)��ͼ3-32 ���մ�������������ĸ�ķ�ʽ�̶���˿��ȷ���������
������˿����λ֮�������Ͻ��Խǵ���˿�����ƴ�������������ĸ�ķ�ʽ
(��ͼ3-33)��ͼ3-33 �����Ͻ���˿��ȷ������
���ڣ���һ���綯���Ѿ���װ��λ��������װ����3������Ҫ����ע�ⰲװ����
�Ʒ���!
��װ������!
���ڻ���Ҫ�����������ӵ�����ϣ���������ȷ��һ�ж�����֮������һ
����������Ҫ�İ�ȫ��ʩ��
3.4.6 ��6����������ˢ�綯��
���ǵ���ˢ�綯����ͨ��֮ǰ���ӵ�������ͷ��3���������ӵ��ٶȿ���������
�������ˢ�綯������İ������ʱ���ܻ�ע�һ������ֵ��£���Щ����û�б�
ǩ�����ǣ�������ԭ��ģ���ˢ�綯�����ٶȿ����������ӷ�ʽ�����д���ֻ�е�
������ת����IJ�ͬ�����������3���ߵ�����������ӣ����綯����������
˵���κ�һ����϶����ᡰ������ֻ������綯����ת����IJ�ͬ�����ǵ��ռ�Ŀ����ʹ���������Ϸ���ĵ綯������ʱ�뷽����ת��������Ϊ��
�ǵ�������û����ɣ�ֻ��Ҫ�����Ƕ������������ڱ����Ժ���½��У����ǿ���
���в������ҳ���Ҫ�ı䷽��ĵط������ڣ�ʹ�ò�����ͷ�ļ�ֵ���Զ�����!
���������һ�����ò�ֱ�Ӻ���Ԫ������ô�ѶȾ�Ҫ��ö���!�����ʹ�õ���
�������в�һ�����ο��Զ���ʻ�ǵ�ʹ���ֲᣬ�Ա�ȷ�ϵ綯���ķ���
3.4.7 ��7��������
��ʱ��ʹ�����ߴ��������߽���������һ�������⡣��������й���֮ǰΪ��
�ȿ������������ŷ��������Ҳ�����档�⽫�ڱ��������Ŀ�Ĺ�����ʹ�������
�ɡ�����ͨ����ϸ�ļǺűʻ����������ESC�����ϱ�ǵ綯����š�
3.5 ��
���ڣ���Ӧ���Ѿ���װ�����ٶȿ������͵綯����ȷ������Ԫ���İ�װ����
�̣����̶Ƚ������ѵķ��ա���Ҫ�����������������ϵ����к��㣬ȷ��û
���������綯�����ٶȿ�����֮�������Ӧ�û�����ʱ�ġ����ǽ��ڱ������
��װ������Ԫ��֮���ٻص��綯������������
��4�� �������
4.1 ʲô�Ƿ��п�����
�Ӹ�����˵�����п����������˻��Ĵ��ԡ���ͨ�����ִ�������ÿ�������ٴ�
�ز��������������ܣ�Ȼ�����ÿ���綯��������ϸ���ڣ���֤�������ڿ��е�
�ȶ����������ڽ�������ʱ��������������߹���ƽ̹�����е�������ʱ����
������Ҫ˼����̬�ı仯����ֻ��Ҫ�����ߣ����Իῼ����Щϸ�ڲ�ִ�У����ͬ
ʱ��Ψһ���뷨���ǡ���ǰ�ߡ������п�����������������ˡ����������˻���
���ÿСʱ10Ӣ��(1Ӣ��Լ1.6ǧ��)���ٶ�ǰ����������ʱ�����п���������
��������������ֽ�Ϊ���ÿ���綯����ÿ���������������ʵ����������
�����������˻�����ij������(�����)�����п�������ͼ��������ı仯�������ʻԱ�Ķ������룬��Ȼ�ܹ�������´������
4.1.1 �Աȿ�Դ���Դ
���Խ������ϵķ��п�������Ϊ���ࣺ��Դ�ͱ�Դ�����еĿ�Դ���п�������
��APM(AudruPilot)��Open Pilot��CC3D��Sparky��MultiWii�ĸ��ֱ��֡���
Щ��Ŀ��һ����ͬ�㣺�κ��˶�������������Ĺ����ļ��������������Լ��ı�
�֡����ǹ����㻨һ��ʱ���������о�����������Ŀ�����Ƕ��кܺõ��������ṩ
�ḻ��UAV֪ʶ��
��Դ���п������и��ָ��������á���Ϊ���е��д�(DJI)��Wookong��
Naza�Լ�X-Aircraft��Super-X��Mini-X����Щϵͳͨ����ר��ϵͳ���û�����
�������������롣
4.1.2 ������
���п������ĺ����ǹ��Բ�����Ԫ(IMU)����ͼ4-1��ʾ�������Ԫ����һ��
���������������п�������ط������Ļ������͵Ĵ������������ټơ�������
����ѹ�ơ���Щ�����������������ļ��ٶȡ���ת�ٶ��Լ���ѹ(���������Ի���
���ɻ��ĸ߶�)����3���������ṩ���Զ���ʻ�Ա��ַ����������ȶ������������
���ݡ�ͼ4-1 ������п��������ڽ���IMU���ⲿ�������˿�
��IMU֮����������ڸ����ܵĴ���������Щ����������GPS���ջ�������
�ơ������������Ϳ��ٴ�����������ʱ������ƣ����ǻ�������������п�������
�������Ĵ���������������ɸ�Ӧ���ܡ�������Ӿ����˹�����(AI)����
��
������APM�������������(IO)���ӵĸ�����
�������1��8
��Щ���ӽ����ӵ����ǵ����ߵ���ջ����ӵ����ռ�����ָ����ݸ�APM��
GPS
����˿ڽ����ӵ����ǵ�GPS��������
I2C(�ڲ����ɵ�·)
����һ�������ļ�����������ߣ����ڶ������衣�������ǰ�ù�
Arduino��������ϤI2CЭ�顣���ǽ�ʹ������˿������ⲿ���̡�PM
�������ǵĵ�Դģ��˿ڣ����ǿ���ͨ������ص�Դ��
JP1
����һ�����߶˿ڣ����ڸ���APM��һ�����õĵ�Դģ�顣
�������1��8
��Щ���ӽ��ṩ�����ٶȿ�����������źš����ʹ��ģ�ͷɻ���APM����Щ��
�ӿ�����һ���ŷ�װ�÷����źš����Ҫ��APM�������˻��ϰ�װ������ͷ����Щ��
�ӻ������ṩ��̨�����������롣
Telem
���ǵ�ң���̨�嵽����˿��ϡ�
A0��A11
��Arduino��һ������Щ���û��ɷ���ģ�����š������в�ʹ�����ǡ�
4.1.3 ��������
��Ȼ��������һ���̶��ϵ���������ÿ�����п�����ͨ�������Լ��ķ�����
�ԡ���Щ��������Ϊ��ճ������ֱ�������Էdz������ط��С����ַ��������ܵ�ӵ
�нϴ�������ĺ�����Ӱʦ������Ƶ�����˵������������������ܸ����ɴ���
����������Ȩ���У������һ�˳��ӽDZ���ѡ�����õ��豸��
4.1.4 ��������
�����ִ����п���������ij����������(��ͼ4-2)���������û����ʷ��п���
���е�������Ҫ������ijЩ�������ֱ�����ͬ���Ʒ���ȶ�������ͨ�����ܿ��Ʒ�
�������á�ͨ�����ú��Զ���ƽ���������ֿ���ͨ��������USB����ң���̨���ӣ��������ƶ�������ƽ̨��ͼ4-2 �ڰ�ƽ�������е�3D Robotics Tower���п�����Ӧ��
���ǽ�ʹ�õ�����������Misson Planner��������һ���ڽ��ĵ���վ����ʹ��
��Ӧ���ܹ���ʾ�ӷ��������ص���Ҫ��Ϣ�������λ�úʹ������������ӵ������
��Щ��Ϣ����ijЩ���͵ķ��о��м���İ���(���ͼ������ũҵ�������)��
�κ����͵ļ�������Ҳ��ʵ�ʵ���;��
��������Ķ�����ʱʹ�ô����������������Ardupilot��Mission
Planner����(http:ardupilot.comdownloads)�����ʹ��Mac��������
APM Planner���档
4.2 ��������
�ⲿ�ֵ�������Ҫ���²��ϣ���1Ӣ��˫�潺��
������
��ϸ����ʻ��Ǻű�
��С���ߴ�
4.2.1 ��1������װ���п�����
APM���п���������װ�ڸɾ���ܵĵװ��ϡ��ڷ��п����������˸�ʹ��һС��
˫�潺��������̶��ڿ����(��ͼ4-3��ͼ4-4)������ʹ�ô�Ƭ�Ľ��������Ժ�
����ȥ����˫�潺����һ���ĸ��������ԣ�����ͨ��Խ��Ľ���Խ��(��һ����
�ȣ�����Ҫʹ��0.5Ӣ���)��ȷ��APM���п���������ǰ�ļ�ͷָ��UAV��
ǰ�������п�����ֱ�Ӷ�λ�ڿ�ܵ����룬Ȼ�����Ƶ�λ(��ͼ4-5)��ͼ4-3 ���´�Լ1Ӣ��˫�潺����װAPM
ͼ4-4 ������һ��Ϊ��������APM���ˣ�Ȼ��˺ȥ����ͼ4-5 ��˫�潺��¶������£���APM��������(ȷ����ָ����ȷ�ķ���)�������ذ�ѹ��λ
�ĸ������ǡ�ǰ����
�ǵ�ǰһ���������ᵽ�������ǵĻ�����ȷ����ǰ�ͺ�����ѹí��ĸ
����װ��֮�������������ĵ���߲ۡ��ɾ���ܵĶ���͵װ��϶�����Щ�ۡ���һ
����־�������ڿ�����ǡ�����۵��ġ�����һ����־������ͷ֧��(���ڵ�8��
�н���)�����ǵĴ���ڸɾ���ܵ�ǰ����ȷ������Զ���ʻ��ָ��ǰ��(�ҵ�APM
����ϵ���ǰ��ͷ)���Ҿ����ܾ��С�ָ�����ķ���������Ĵ�Ů����ǰ��
��!
4.2.2 ��2�������ӷ��п��������
��������ǰ�������۵ģ����п�����ֻ������һ������������ȡһ�����룬������Щ������м��㣬Ȼ���ͺ��ʵ��ź��Ա��ַ���״̬�����ڣ�����Ψһ��
Ҫ���ӵ����п��������ǵ綯����ESC(���)���۲�APM�ϱ��Ϊ����1��8����
����ע�⣬ÿ���������3����ֱ�ѷ��ڱ�ǩ����֮�µ��������š����������Ŷ�ӦESC��ÿ���ŷ����ߵ��źš���Դ�͵ء����ŵ��Ҳ�������ı��(S��+��-)����
��Ԫ�ı������ֱ�ӿ������ǡ�
������ɫ��
��ESC�Ͽ�������ɫ������ʱ����Ϊ�ŷ��ߡ��ŷ���������������������ĸ��
������Դ���źź͵��ߡ��ߵ���ɫ���ܱ仯�����鷨���ǣ���Դ�����Ǻ�ɫ�ģ���
�������ߵ���ɫ�����ַ�����Ǻ�ɫ���߰�ɫ�ź��ߣ���������ɫ���߳�ɫ
�ź��ߡ����ھ�ѧϰ��һ�����������������������в�����˶�ͷ�ۡ�
���1��2�ֱ��Ӧ���������Ϸ���ĵ綯����ȷ������ÿ���綯�����ٶȿ���
��������ESC���ŷ������߲����Ӧ��������ӡ�����ʱҪȷ�����е���(��ɫ)��
���ŷ������ߵ��·����ظ���һ���裬����������ĵ綯����������3�����Ϸ����
�綯����������4��ͼ4-6��������չʾ����һ���֡�ͼ4-6 ÿ���綯������һ��ר�õ��������ת����APM��Ԫ��APM��ͼ��ָ��ͬһ��ǰ������
Ϊ����ȷ��������Щ���£���С������ʻ��Ǻűʱ��ÿ��ESC��ͷ��Ӧ����
�����롣�����ر��֮�������в�ͷ�ļ�ˣ��ڲ�ͷ���·����ŵ��·������
һ����С�����ߴ����������ڱ�֤��������������ڣ���������´����ɾ���ܱ�
���4�����ο��е�һ��(����APM�������)��ͼ4-7�п��Կ�����һ���̵���ϸ
��Ƭ��
���ڣ���ÿ��ESC��ͷ����֮ǰ��ǵ�APM������ӡ������ȷ�������Щ��
�裬APM�ͷ�������ESC֮�佫����������ӣ�������ͼ4-8��ע�⣬���Ǿ����ܵر�֤�˽��ߵ����ࡣ
ͼ4-7 ���ǵ�ESC��������ش����ܴ����ɾ���ܱ���Ŀף����������ӵ�APM�ϵ��������(ע�⣬�ɾ���ܵĶ��屻�ƿ����Ա����㵽���õ���Ƭ������һ�����DZ����)ͼ4-8 ����ESC�����ӵ�APM�������(ע�⣬�ɾ���ܵĶ��屻�ƿ����Ա����㵽���õ���Ƭ������һ
�����DZ����)
���ʹ�õIJ���APM���п�����������ʹ���ֲ���ȷ����ȷ�ĵ綯�����˳��
APM���Ǵ����1��ʼ���������˻�ʹ�õĵ綯���������ϼ���������ֱ��������ʹ
���������1~6��������ֱ����ʹ���������1��8��
4.2.3 ��3�������������ӿ��
���ڣ����ǵ�ESC�Ѿ���APM���������Լ����������ӿ��������������Ҳ����
�ã���2����������ʱ�Ѿ���������һ����������ǵ���һ�������Բο�2.3.4�ڡ�
�ع�һ�£��㽫��4��5mm�İ�װ��˿�����ɾ�����ϵİ�װͻƬ��š������
�����Ķ�ѹí��ĸ����ͼ4-9���ܻỽ����Ļ��䡣ͼ4-9 ����������������������ӿ��������һ��
4.3 ��
���ڣ����ǵķ��п������Ѿ��ι̵ذ�װ�ڸɾ�����ϣ��������������4����
���������ӡ������������ӣ�ȷ����������Ӷ�Ӧ����ʱ���и��ˣ����Լ����Ժ�
���鷳����5�� GPS�����̺͵�ؼ����
�����У����ǽ������������˻��ϵĸ���������õ������½ڽ���ÿһ����
������ôƪ���Ե�̫�̣��������ǽ��ڱ��¼��н��������ָ�����
5.1 GPS
ʹ��GPS(��ͼ5-1)���е����������˻���ģ�ͷɻ���Ȼ�ֿ���������������
��������ʹ����ˮƽ�ﵽ��ǰ��δ�еĸ߶ȡ����ֶ���Ŀ���ʹ���˻�����߿���
Ϊ�ض��ķ������Ϳ�������ģʽ��
ͼ5-1 �����������̵�3DR uBlox GPS��Ԫ
����ģʽ�������ع�GPSʵ�ֵļ��ַ���ģʽ��
��ͣ(λ�ú߶�)
��ͣ(Loiter)��������õ�GPS���ܣ���������������ģʽֻ�谴��һ��
���أ�����ʹ�������̶����ض���λ��(γ�ȡ����Ⱥ߶�)���̶�λ��ʱ�����
��������λ�ñ��κ��������ı䣬�����Զ�У�������磬һ��������ͣģʽ�����
�����������������λ�ã������Զ��ɻء��������������£�����ķ�Χͨ��Ϊ��
��2m���߶�Ҳ������ͬ�ķ������ƣ���ֵ��Χͨ��������3m֮�ڣ���������ʹ��
GPS��������ʹ�ø��ӵĴ��������Կ��ƣ����ڲ���ѹ�ơ�
�������ϱ���
����(Return to Home��RTH)���ִ�UAV��õİ�ȫ����֮һ��ֻ��ʹ��GPS
�ſ���ʵ�ָù��ܡ�����ģʽʹ�������ܹ�ȷ�������ص�(ͨ���������ɵ�λ
��)����ijЩ���ϱ�������·��ظ�λ�á�ʧȥ������������ߵ�������RTHģʽ��
������������֮һ������������ܷ����ڷ����е�̨��غľ����߷ɳ����ߵ�㲥
��Χ֮��ʱ����Щ�˻������ǵĵ�̨�ϱ��һ��ר�õ�RTH�������ء�
RTH��ȫ��
��ȻRTH��һ���ܰ��Ĺ��ܣ���������Ҫʱ������ķ�����������Ӧ�ð�������
һ�����ϱ������ܣ������dz��ù��ܡ���Ҫ���������ŷɵ�̫Զ��λ�ã���������
������������������֮����Ҫ����RTH���ܡ�
·������
GPS����������һ��ʹ�÷�����ͨ�����·���������������������������
����п������ϴ�һ������ָ���б������߽���Щָ���Ҫ������������ִ
�С����ּ�����UAV�����ҵ���ر����ã��������ҵ�У�����һ����һ�ε��ظ���
���ķ���ģʽ������ͼ����·������ʱ��ʼ��Ҫȷ�Ϸ������ϵ�GPS�����Ƿ�����
��������������ܹ�����λ�ò���ȫ������Ӧ�þ�����ִ��·�����С�
�ҵ�GPS�Ƿ������������˽�GPS�ľ�ȷ���Ա��⸴�ӷ���������յķ���֮һ���ڵ�����������м���
��λ�á�������������һ����Ŀտ������е��ȶ�λ�ã���Ҫ�ƶ��������������
�ڵ������������Ư�ƣ�������GPS�ܵ���ij�ָ��š����·��÷��������ظ����ԡ�
��һ��ѡ��������GPS��λ�ã�Զ����������Ԫ����
����ģʽ
���������������GPS���ݵ�����ʹ�÷����Ǹ��湦�ܡ�����ģʽʹ�û�����ʹ
���ƶ�Ӧ�������˻�ʵʱ�����û�λ�������������˻������ƶ��豸���͵�λ����
�ݣ�����Ԥ��ȷ���ĸ߶Ⱥ;����ϸ����㡣���������������������ϣ���һ����ʵ
�ֵĿ����ԾͲ���˼�顪������һ�£�һ���������˻�ʼ���������ķ���ͷ��20Ӣ
�ߵĸ߶ȡ������ǣ�����ģʽӦ��С��ʹ�á���Ϊ��С��UAVû�и�֪����
����������ģʽ�ڷ�ջ���ӵ�»����¿��ܻ�����鷳�����������֦�»�ѩ����
��ֱ����������֪����һ�ж�ײ�����ǡ�
5.2 ����
��ȻGPSʹ���ǵ����˻�����˸��ߵ���������������������ܱ���ǰ���ķ�
����Ҳ�ͺ��������ˡ����̽��������������⣬��������GPS������ͬһ����Ԫ
��(����������ʾ���������)�������ܸ������˻����еķ����ܸ������˻�
��ʼʱָ��ķ����Լ������ڼ䷢���ı仯��
�����������
�Դ�����˵�������̡�һ�ʿ��ܺ����һ��ͽ�����л���ͯ�Ӿ�̽�ջ
�п������Ǹ���������Բ��������ϵ��һ���㵱Ȼ֪����˵�ľ���ָ���롣���
APM��������������������豸����ʹ��һ��С�͵��Ӵ�����(������)Ѱ�����̷�
�
���紫ͳ�����̣������Ʋ�����Χ�Ĵų���������Щ��Ϣȷ����Եķ���
ֻ��������������ʾ���ڱ����У������̡��͡������ơ��ǵȼ۵����
�Ա�APM 2.5��2.6���������õ������Դ���������յõ����ֲ�ͬ��APM���п������汾������֮
����һЩϸ�IJ�𣬵������ǹ��ĵ���Ҫ�����̡�APM 2.5ʹ���ڲ����̣���APM
2.6���Ϊͬ��GPS�����е�һ���ⲿ���̡���ʹ�ô��������Դ�APM�������Ƴ�����
���ڸ�Ϊ�ʺϵĻ�����(�Ӵ����ĽǶȿ�)����GPS�����ڡ������ӵ�е���APM
2.5����Ҫ����!�����ڲ����̣�ʹ�ø��µ��ⲿ��Ԫ�൱��
5.3 ��ؼ����
�����ǵ������У���һ����ͷ��Сȴ����Ҫ�ĸ����ǵ�ؼ����(��ijЩȦ��
��Ҳ������Դģ��)������һЩ���п�����Ĭ��������ij����ʽ�ĵ�ؼ��ܣ�����APM�����㽫����Ϊ��ѡ�Ĵ��������ӡ������ǿ�ѡ�ģ���������ǿ�ҽ�������
��������������һ�豸(��ͼ5-2)�����ṩ��ijЩ�������Ҫ������Ҫ���ݣ���
��APM������Ϊ�����������(ȡ������Ĺ�����Դ)��
ͼ5-2 ���ǵ����ߵ�ؼ�����ڷ���ʱ�ռ��dz���Ҫ���������ݵ�ؼ���ǵ�ԭ���ܼ���һ��С��·��������ص缫������ʹ������ռ�
�ؼ��ĵ�ѹ�͵�����Ϣ��������APM���ɴˣ����ǿ�������̼����ݸ���Ϣ��ɲ�ͬ
���������ڴﵽijһ��ѹʱ�Զ���������Ϊ���ϰ�ȫ��ʩ��
5.4 ��������
��������չʾ��װGPS�����̺͵�ؼ���ǵIJ��衣�Ӱ�װ�ĽǶȿ����ⲿ����
���ƺ��൱������������С�ģ���Ϊ����Щ���淸�����ܼ����Ӱ�������
���ȶ��ԺͿɿ��ԡ�
5.4.1 ��1������װGPS�豸
��װGPS�豸������������������IJ���֮һ����Ҫ����Ҫ֪����GPS
�豸������һ�����̣�����ζ������������ͱ���֮�֡�ʼ��ȷ����ǰ�ļ�ͷָ��
�ɻ�ǰ����������GPS����Դ�̧����װ֧�ܣ�һ��Ҫʹ��(��ͼ5-3)�����û
�С�����������û�а취�����������Դ�3D Robotics����Maker Shed�϶���һ
������GPS�豸(���ڲ�����)��װ�ڸ����������װ�õ�λ���Ա���ų����ţ���
ͨ������õ���������ѭ��װ֧�ܵ���װָ�ϣ���֧�̶ܹ������˻�������ܵĶ�
���������ܿ������ġ���֧����ʹ�ý϶��˫�潺(�����跨����˿�̶�)ʹ����
�̵ض�λ��ͼ5-3 3DRΪuBlox GPS�����˺ܺõ�֧��
�������ǵ����˻��������ö����37mmѹí��ĸ����һ��3D��ӡ�ĵ���������
�Լ���GPS֧��(��ͼ5-4)���㽫�ڱ������µĴֲ�ͼ�п��������Ԫ������
��ʹ�õ�GPS��Ԫ�ͺţ��������Ͽ����ҵ����ֿ�3D��ӡ֧�ܵĿ������
(http:gettingstartedwithdrones.comgps)��ͼ5-4 �����������ʹ�����DIY GPS����
5.4.2 ��2��������GPS��������APM
�����Ϊ�Լ������˻�������3DR uBlox GPS����Ӧ���Դ�����(���ܸ���)
С���£�ʹ��������ӵ�APM���Ӱ�װ����ȡ�����Dz������顣���GPS�ɴ��伸
�ֲ�ͬ���Զ���ʻϵͳ�����Կ����Դ���Ӧ�IJ�ͬ���¡���Ӧ���ҳ�������ʶΪ4λ
��5-6λ�ĵ��¡�������ȥ�ƺ��е�Ź֣�����ʵ���Ϻܼ���λ��ָ���Dz�ͷһ
�˵������������ǵ������У�ʹ��һ�����˾���4λ�����ߣ�����֮����4���ߡ���
����������(������)�ĵ��¡����ǵĵڶ�������һ����5λ����һ����6λ������
֮����5�������ӡ���û��������һ����ͷ����һ����λ������������������������
�赣�ġ��˺����ǽ�˵�����������ԭ�����ڣ�������ͼ5-5�п������ǽ�Ҫʹ��
�ĵ��¡������û���������̵ĵ��£��������߹�Ӧ�̣��ر�����ͬһ���̵깺��
APM��GPS�������!ͼ5-5 ȷ���к��ʵĵ���
ȷ���˺��ʵĵ���֮��������������GPS��Ԫ������GPSû��̫����Ҫ˵����
�ط�������һ��С�ĺ�ɫ���飬������������ΪGPS��MAG�Ķ˿ڡ���ϸ�۲����
��ע���GPS�˿���6�����룬MAG�˿���4�����롣�����Dz��������ˣ�5-6λGPS
���½�����GPS�˿ڵ�6�������ϣ������̵��¿��������ǵ�4λ�����е��κ�һ��
(��ͼ5-6)��ͼ5-6 GPS�豸һ��������˿�
MAG�˿�
�����û����ʶ����GPS�豸һ���MAG�˿��Ǵ�����(Magnetometer)����
д�������ṩ���̹��ܵĴ������ļ������ơ�
�����Ѿ������µ�һ�˲���GPS�豸�����潫��һ�˲���APM���ҵ�����GPS��
��(GPS�豸��)��5λ���£��������APM�ϵ�GPS����(������ǰ��ͷ���Ա�)��
���ڣ�����һ��4λ��ͷ����I2C�˿�(�ڲ����ɵ�·����д)�����������µ�����
ϸ����ͼ5-7��ʾ��ͼ5-7 ���ǵ�GPS������(������)���ӵ�APM
С�IJ�ͷ!
���ഫ������ͷ���ܺ���ʹ�á����Ƿdz�������һ�����룬���¾Ϳ��ܽ��������������˻�ʱ��������Ϊʲôԭ������Щ��ͷ��������С��!���ǽ���ʹ
��С��ƽͷ��˿������ؽ������������ͬʱ�����������¡���Ҫ̫������!���
��С�ģ�����Ӳ�ͷ��������������ϰ��ʹ���������֮ǰ�����������������
��Ρ�����ʱ������ƣ���һ������������һЩ�������ڵ�һ�δ���ʱӦ�ø���
С�ġ�
��β����ͷ��
��һ����ݵķ����ܹ���������ν���ͷ��������С����в���APM��Ԫ��
�����Ҳ��һ����ɫ��(�ɶ˿��ϵ����ֱ�ǩȷ��)����ֵ��ǣ����Ƿ�����
uBlox GPS��Ԫ�������෴����ɫ��������ࡣ��GPS��APM��������ʱ�ر����ԣ���
ͼ5-7��ʾ��
5.4.3 ��3������װ��ؼ����
������ǽ���װ��ؼ���ǡ���ס�����ǿ�ѡ�ĸ��������ѡ��װ����
������Ϊ��ʡ����������������������һ�������ǣ������˻������ڼ�����Щ��
Ҫ���ݺ��м�ֵ�����ǹ�������ⲿ��������
��װ������˵�ܼ����ȣ�������(���ߵ�Դ����)�Ͻ���������߲���
��ؼ���ǣ�Ȼ��6λ��ͷ����APM�ϵ�PM�˿ڡ����ڣ�����ز����ؼ���Ƕ�
���������ϵ�����Դ�����ߡ�ͼ5-8չʾ�˲�õĵ�ؼ���ǡ�
���ȣ�����ؼ���Dz��������е������������(��ͼ5-9)�������ʹ�õ�
�ؼ���ǣ�����������ͨ���������С�
��������������Ҫ�ڿ�ܵĺ�װ��ؼ����(��ͼ5-10)�����ȣ���ԭ��
�ĵ�������߲�ͷ����ɾ���ܺ�����֮��Ŀռ䣬ֱ����ܵĺ������ͷ
Ӧ���ܹ��ܺõ���ɾ���ܵײ��ļ���Ǵ��䡣һ��Ҫ��6λ���´�������ǰ��ESC
��ͷ���õ���ͬ�߿ף������ܵĵײ����������µij������Ե���������Ŀ�ꡪ��
APM�ϵ�PM�˿ڡ�
��Ϊ��ؼ���ǵ������ߺ̣ܶ��������ǿ���һ�������ߴ�������ǹ̶��ڿ�
�ܵĺ�ˣ�¶���µĵ�������ߣ�����������������(��ͼ5-11)��ͼ5-8 �������ǵĵ�ؼ���ǣ���ͨ���嵽PM�˿ڵ�6λ������APMͨ��ͼ5-9 ��ĵ�ؼ����Ӧ���к������������ͬ���͵IJ�ͷ(�����ǵ���������XT-60)ͼ5-10 ��ؼ���ǵ�λ�����ù̶��ڻ�������ϵ���
ͼ5-11 �µĵ�������߿������ӵ����е��
����ֻʣ��һ����������ˣ�����ؼ���ǽӳ���6λ���²��뱾��֮ǰ�Ѿ���
�ܹ���PM�˿ڡ������еĺ�ɫ��һ��Ҫ���Ҳ�(�˿ڱ�ǩ����ָʾ)��
5.5 ��
GPS�����̺͵�ؼ���Ǿͽ��ܵ����������棬���ǽ�ʹ�÷��п���������
ȷ��GPS��ȡ����������Ҫ���źš����ǻ����˽��ؼ���ǵ����á����ڣ�ת����
һ�½ڡ�
��6�� �����6.1 ʲô�Ƿ����
ĿǰΪֹ�������Ѿ������˷������Ķ��ֲ�ͬ��������ǻ�û��̸����������
���Ʒ���������Ƿ����������(��ͼ6-1)��������Ƿɻ��ġ�ң�������������
ʹ�÷��������������������������ݸˡ����ˡ���ť���߿��ء�����ӷ���
�������������ϵĽ��ջ������߽�������Զ���ʻ�ǻ������������
ͼ6-1 FrSky�����Taranis�����������
6.2 ��õ�Ƶ��
��ң�ط����������ڣ�ģ����������ʹ�ýϵ͵�AMƵ�Ρ���һƵ�ε��ŵ��Ǵ�
�����ܳ���������һ���ش��ȱ�㣺һ��ֻ����һ���˵�г����Ƶ�ʡ������������ڷ������������ͬ��Ƶ����ֻҪ������Ϳ��ܸ�����ķ�������
�ִ�������Ѿ�ͨ��ת�Ƶ����ߵ�2.4GHzƵ�Ρ�ʹ����Ƶ����ȷ��ͬһʱ��û
���κ��˴���ͬһƵ�Σ��˷���������⡣�������Щ�������Ѿ���ʼ��ң��Ƶ��
��ߵ�5.8GHzƵ�Ρ����������ǾͿ��Ա���2.4GHzƵ��������Ƶ����(��8���н�
��ϸ����)��֪����ʹ�õ�Ƶ�κ���Ҫ����Ϊ��Ⱥ��ӷ���ʱ�����ͻ��Ƶ�ʽ�
���ᡰ��ա������ܻ�����鷳��
>���鷨��
��Ҫ��ͼΪ5.8GHz���Ʒ��������5.8GHzģ����Ƶ�������ͬ����Ӧ�ñ���ͬ
ʱʹ��2.4GHz���Ʒ������2.4GHzģ����Ƶ���������Щ������������ͬƵ�ʣ�������ɸ��š���Ϊ�����ʹ��5.8GHz��������2.4GHz��Ƶ���������֮��ɡ�
6.3 ȫ����صIJ�ͬģʽ
����ң�ط����ʱ�˽������ģʽ����Ҫ������ʹ��ģʽ2������ģʽ�����ź�
����水ť��������ݸ��ϣ���б�ͷ�����ť�����Ҳ��ݸ��ϡ�ŷ���ձ�ͨ�õ�
ģʽ1�в��ݸ˵�������֮�෴���������Ҳ��ݸ��ϡ�
6.4 �Ա�PWM��PPM
�����֮ǰ������RC������������Ѿ�������ص�����PWM��PPM�����Ƿ�
������������(Pulse-Width Modulation��PWM)�������(Pulse-Position
Modulation��PPM)����д����Щ��ǩȷ���˽��ջ�(��ͼ6-2)�ͷ����������֮
���ͨ��Э�顣����֮�����Ҫ�����ǣ�PPM�����ּ�������PWM��ģ�⼼������Ϊ
�����ߣ��㽫ע������ڰ�װ�ϵ����ͬ�ǣ�PPM������һ������ʵ��9���ŵ�
��ͨ��(���ֻ�����ͨ��)����PWM��ÿ���ŵ���Ҫһ����(ģ��ͨ��)�����ķ���
�����Զ���ʻ�ǵ��ĵ����˽�ʹ�õ�Э�����Ҫ���������ʹ��PPM��ǿ�ҽ���ʹ��
������Ϊ��ʹ�õ��߽��٣���װ���̽���÷dz���ࡣ���ǣ�����������Ӳ����֧
��PPMЭ�飬���Ա�������ֲ��Եõ���һ���IJο����ڱ����дʱ��APM����Ҫ��
���汾����֧�����ֻ�ͨ��Э�顣��������֪����Щ������Ա�Ѿ�������֧������
Э��Ķ��ƹ̼������Dz��������ְ�װ���Զ���������Ա��δ�������ԵĹ̼������ʹ�ùٷ��汾���ڶ����ڻ����ɵö�!
ͼ6-2 Spektrum��6ͨ�����ջ�
>���ֻ�Э�����������
�����������Ѿ��������Լ������ֻ�����ͨ��ר���汾��������Ϊ����������
�磬˫Ҷ(Futaba)��˾����汾ΪSBus��
6.5 ��������
�ⲿ��������Ҫ���²��ϣ�
��1Ӣ��˫�潺��
������
�����Թ��ŷ���
6.5.1 ��1����ȷ������װRC���ջ��Ĵ��˼·�ܼ������ջ���װ�ڻ�������ϣ�Ȼ���ڽ��ջ�
���Զ���ʻ��֮������һϵ�е��¡���ΪPWM��PPM֮��IJ���Լ������̱���
��ͬ�����ջ����Զ���ʻ��֮���м�ʮ�ֲ�ͬ�����߷�����Ȼ���������ڴ�ֻ����
һ�֣���Spektrum�����ջ�(��ͼ6-3)��PWM���ӡ�������������Dz�ͬ�IJ�
Ʒ��������Զ���ʻ�Ǻͷ�������û��ֲ���ȷ����ȷ������˳��
��һ���ǡ�ǰ����
һ��Ҫ����Щ�����װ����ȷ��λ���ϡ��������ʶ���ܵ�ǰ������Ϊǰ��
��һ�����ȱ�ڣ���������ͷ�ĸ���֧�ܡ���һ����ʾ�ǣ�����������ĺ���
��������ǰ����
ͼ6-3 ���ǵ�Spektrum���ջ��ڹ���̨�ϲ���APM�������
6.5.2 ��2������װ���ջ�
ʹ��һ����˫�潺���ڻ����ϵ�ij��λ�ð�װ���ջ�(��ͼ6-4)�����ǽ���
������ڻ�����ǰ������Ϊ�����ں�����������������ӵ�APM��������ӡ�
����ͨ�ų�ͨ������������õ������ǡ�С������������Ϊ���ջ���һ�������Զ���ʻ��
��λ�ã��������Ա��ֵ����ϵĿ����������������ߡ���ס����Щ����(��̼��
ά)���ܻ�������ߵ�Ĵ��䡣�����ڽ��ջ��͵��������֮��Ļ������־�����
����һ�������⡣������ջ��нϳ������ߣ������ܽ����������֮��ϵ͵�λ
�ã��ṩ��õĽ������ܡ�
ͼ6-4 Spektrum���ջ���װ�ڻ���ǰ��
6.5.3 ��3������ͨ���ջ�
��5���̵Ĺ��Թ��ŷ��߰���ͼ6-5���ӡ�������1���ӵ����ջ��ķ���ͨ������
��2���ӵ�����ͨ��������3���ӵ�����ͨ��������4���ӵ�ƫ��ͨ�����������5
���ӵ�Aux 1�����ǽ������ͨ���л���ͬ�ķ���ģʽ��ͼ6-5 APM PWM����ͼ
��7�� ң���̨
7.1 �������������
��ĿǰΪֹ�����Ѿ�ע�����RC�������һ���dz���Ҫ�����������ֻ��һ
��������ͨ�š����ӷ��������������Ϊ�˷��ʷ������Ļ������ݣ����DZ���ʹ
��һ��ר�õ�˫���̨����ң����·��
ѡ����ʵ�Ƶ��
ң���̨���������ֱ�Ƶ���¹�����������������ͨ��ʹ��915 MHzƵ�Σ���
ŷ����ƫ��433 MHzƵ�Ρ���Щ����ȷ����Ϊ�˱�����г������������豸�ĸ�
�š��ڴ����Ƶ���Ϲ�����ijЩ�����ǷǷ��ġ�һ��Ҫ�������ڹ��ҵķ��ɣ��˽�
Ӧ��ʹ�õı���
����˼�壬ң����·�ӷ�������ȡ��һϵ�м���ֵ�����䷢�ص��棬���ڵ��������������ʾ(��ͼ7-1)�����⣬����(��·���㡢������������ͷ�������
��)���Դ�ͬһ��������������ϴ�����������
ͼ7-1 ��̨��ƽ����Լ���ң���̨��һ����ѵ�Ӧ�ã��Ϳ�����Ϊһ������վ
�ڵ����Ͼ��ܷ���������Ϣ����һ��������ơ����ܹ���������ʧ��֮ǰ��
�����⡣�������������Ҫ�����ݵ����ά�ȡ����ȡ��߶ȡ���������̬����ǰ��
�ص�ѹ�������������ٶȺͷ���ʱ���ȡ�������ڵ�������������ֲ����ҵ�ͨ
�����ݵ������б���
7.2 ��������
�ⲿ��������Ҫ���²��ϣ�
��1Ӣ��˫�潺
��1Ӣ��ά���Ρ����ߴ�
7.2.1 ��1������װ����վ��̨
ң���̨��ʵ���ϰ���������ͬ�ĵ�̨������һ����װ�ڷ������ϣ���һ��
����ĵ��������������(��ͼ7-2)�������̨���Զ��ַ�ʽ��װ�����ǣ�����һ
����ά���ν���̶�������������ƽ����Ի��߱ʼDZ����Ա�����ʹ�����ڲ�ʹ
�õ����������ʱ�����Ƴ���̨��
ͼ7-2 ʹ��ʱ��ά���ν�ң���̨�̶���ƽ����Ա��棬������ʱ�������ɲ��
����վ����
��ΪAPM��һ����Դƽ̨����������õĵ���վ��������������ϲ�����ǰ�ƽ
���ϵ�Tower��Windows PC�ϵ�Mission Planner�������ʹ�õ���Mac�ʼDZ�������
����APM Planner������Mission Planner�dz����ƣ����п�ƽ̨�汾��������
Windows��OS X��Linux��7.2.2 ��2��������װ��������̨
���ڷ�������̨�����ǽ���ʹ��˫�潺������̨�̶��ڻ��������(��ͼ7-
3)������������Լ��0.5Ӣ���˫�潺�����ڵ�̨�Խǵ������ϡ����ڰ�װλ����
һ��������ԣ��������ǽ��齫��̨���ڻ����ĺ�벿�֡��⽫ʹң���̨������
��Զ��RC���ջ���
ͼ7-3 ����ʹ��˫�潺����̨�̶��ڻ�����
���ڻ�����Ҫ�̶���̨������ϣ���ý�������̶���������Ȼ��ҪΪ��̨��
�ߣ����ڰ�װ֮ǰ���н����öࡣ
��һ���ǡ��ϡ���һ��Ҫ����Щ�����װ����ȷ��λ���ϡ��������ȷ�������ġ�ǰ��������Ϊ
����Ϊ���������֧��Ԥ���Ĵ��Ϳ��ڡ���һ����־���������ܵĺ�(������
��ǰ)�۵���
7.2.3 ��3������ͨ��̨
Ϊ�µ�ң���̨����ʮ�ּ�(��ͼ7-4)���ҵ���̨�Դ��ĺ��ʵ��£������
���������̨�ĺ�벿�֡�����������5�������ĵ���(4�����ߺ�1������)������
���˵IJ�ͷ����6���߲ۣ�����1�����ա����dz�������������µ���һ�˽�������
����ʻ���ϵ�ң��˿ڡ�
ͼ7-4 ����ڰ�װ�����֮ǰ���У�ң���̨�����Ӿͻ����ɵö�
7.2.4 ��4������װ��������̨
���ڣ����Ѿ����Ӻõ�̨�����Լ������䰲װ�ڻ�����(��ͼ7-5)��Ӧ����˫�潺����̶���λ����̨һ��Ҫ������֮�⣬ʹ�����ܹ�����Ҫʱ������ת������Ҳ��Ҫ���̫�࣬�������������
�㽫��ע����²�ͷ�����Сͻ����ʹ����ֻ�ܴ�һ��������롣������
�������֮ǰ�ҵ���Щͻ��ȷ�Ϸ���(��ͼ7-6)��
ͼ7-5 ��װ�õ�̨�����ղ�Ʒͼ7-6 ÿ����ͷ���������Ƭʹ��ֻ�ܴ���ȷ�ķ������
��8�� ����ͷ��FPV�豸
������ӰĿǰ�����˻�����ѡ��;���������˻�����ͷ��������Ե������顣
��������ͷ���鼮���Ժ��Ǹ��ָ��������ã��Ӽ�ֵ5����Ԫ�Ĵ��ͺ�����ӰԺװ��
��С���˶�����ͷ��������������������ʾ������ʹ�õġ����´��Խ��̶ܹ�֧��
����ͷ�Ļ���֪ʶ����������ͷ����ʵ��ֱ����������ͨ�����źŷ���С����ʾ��
������Ƶ�۾��ϡ�
8.1 ���е����˻�����ͷ
��������һ�����İ����Ϊ���˻�ѡ����ʵ�����ͷ������һ�������ѵ���
����ѡ���κ����˻���������ͷʱ����������Ҫע������5�����棺
�����ͳߴ�
������������������һ��������ʼ��������Ҫ���ǵ����ء�������������
�����⡣
Զ�̴���
������Ƶʱ������Լ��ڵ���������Ƶ¼�ƣ�����ʱֹͣ�����ǣ����ھ�̬��Ƭ��˵������һЩ����̬��Ƭ��Ҫ�����������ڼ����������ͨ���Ľ����
����������ͷ�м���һ����ʱ�ع���Ƽơ�����豸�����Ͼ���һ����ʱ����ÿ��X
��ʹ����������һ�Ρ��������н��������������ʵ�ʰ�������ͷ���Ű�ť�Ļ�
е�ŷ��ۣ���������ͨ������RC��������Ƶĺ���ң������
ֱ����
���˻�����ͷ����һ������Ĺؼ�������ͨ������ͷ�ϵ�ij������˿����ֱ
����������������˿ڿ���������߷ֱ��ʶ�ý��ӿ�(High-Definition
Multimedia Interface��HDMI)�����������ͨ����ͬ��ͷ���͵�ģ���źŶ�
�ڡ��������Ƿ����ţ�ģ���ź��ڴ�ʱ������ѡ�ķ�����ԭ�������ǵ���Ƶ��
���ֻ�ܽ���ģ���źš�
����ͷ�ֱ���
�ҵ���������Ҫ���һЩ����ͷ֮����Ҫ��������ķֱ����ˡ�����Ƶ��
�ԣ��ֱ��ʲ������⣬���ڣ���ʹС���˶�����ͷҲ���Դﵽ4000�ĸ߷ֱ��ʡ���
�ǣ���̬��Ƭ����һ���¡�һ��Ҫ��顰�������ء���ƣ�ȷ�������������
�ɱ�
������4��������СDZ�ں�ѡ����ͷ�ķ�Χ֮��Ӧ�ÿ��Ǽ۸��ˡ���ͬ���
������ͷ�и��Եļ۸����䣬����һ��Ҫ��Щ�о���ȷ���õ������ļ۸�С�͵�
Կ������ͷ����100��Ԫ���������˶�����ͷ�۸���100��500��Ԫ��С��M43��
���ļ۸���300��1000��Ԫ�����뵥������ļ۸�����500��Ԫ���ϡ�
8.1.1 M43���
2002�꣬43ȫ���뻯���ű�ϵͳ�Ƴ�����ϵͳ����������ͬ�����ϵ����
�����;�ͷ(��ͼ8-1)����һ������Դ��ͼ�����ij����ȣ��ô�������ȫ��
DSLRС30%��40%�������ԱȽ����͵ġ�ɵ�ϡ������9�����ҡ�ͼ8-1 �dz����е�M 43���Lumix GH4���䱸���ְ�˹17mm��Ǿ�ͷ
43ϵͳ��UAV������������Եĺô��ǽ�С������ʹ��С�����������ͷ��Ϊ
���ܡ���Ӧ�أ���С�������ľ�ͷʹ�����п��ܴӸ��ӽ�ֱ�ǵķ�������������
����ֱ����������˾����������Ƭ�ܽ��ķ��ա��ʹ����ͼ����ĽǸ�����
��������֮������ķֱ��ʸ��ߡ������ϣ�ʹ��43�������������Խ�С������ͷ
�غɻ�ø���������Ƭ��
�������ǵ�����ʾ�������ǽ���ʹ��Mobius�˶�����ͷ����808Կ������
ͷ��
8.1.2 Mobius�˶�����ͷ
�������ǵ�С������ֱ���������ǽ���ʹ��Mobius�˶�����ͷ����ͬ��������������ͷ(��ͼ8-2)�����������ͺŵ�����ͷ�������ᣬ����ʹ�ã����ʺ��ڡ�С
�������ijߴ磬���ļ����ؼ��������£�
��ռ�ÿռ�С��61mm(��)��35mm(��)��18mm(��)��
���������Լ38g(ȡ���ڹ�����ͺ�)��
�����ÿɳ��﮾ۺ����أ�����Ҫ���ӵ��������ĵ�Դϵͳ��
��ȫ������Ƶ��1080p30 FPS��������������Ƶ720p60FPS��
����̬��Ƭ��ʱ�ع���Ƽƣ��ֱ������Ϊ2304��1536������Ҫ�ⲿ�������
������ÿX���Ӵ���һ�Ρ�
��������Ƶʱ����ʵʱ���ͣ��dz��ʺϴ�����Ƶ���ջ���
ͼ8-2 �˶�����ͷ�о٣�GoPro Hero 3��Mobius��ǡ�Mobius����ͷ��808Կ������ͷ
8.2 ����ֱ������FPV
���˻���һ������Ĺ������ܹ�ʵʱ�����������������������������ͨ������һ̨��Ƶ�������ʵ�ֵġ���̨�����(VTx����ͼ8-3)������ͷȡ��ֱ������ͨ���ض�Ƶ�η�������Ľ��ջ���Ȼ���ջ����ӵ���ʾ������Ƶ�۾�����ʾ
ֱ����Ƶ��
ͼ8-3 �䱸��ѡ��ޣҶ���ߺ�ֱ����������5.8GHz��Ƶ�����
��ͳ�ϣ�����ͨ��ͨ��5.8 GHzģ����Ƶ��������ջ����С����ǣ����һЩ
�����̿�ʼʹ��5.8 GHz����2.4 GHz WiFi���磬���ƶ��豸����ʾ��Ƶ��������
��Ƶ�����ܹ���ͬ������Ȼ��һ̨����������źŷ��䵽���湩���ջ����գ�Ȼ����ij����ʾ������ʾ��
�����ǵ��������䱸ʲô�豸��
��Ϊ����������������ʽ��С���������������豸�����ܵ͡�������Ѿ�
��װ�˻��ص�APM��GPS������ͷ����ֻ���ٰ�װһ�ָ����豸�ˡ�����֮�������
��FPV���������ң���̨��ѡ�������Dz����齫���߶���װ�����˻��ϡ�����
�Ѿ���ǰ�����������ң���̨�Ĺ��̣���˽�����˳����һ����·��������һ��
�ع�FPV����Ϣ�����ǣ�������װ��Ƶ�����������FPV�豸����Ȥ�����Է���
���ǹ�����һ�������ҳ(http:gettingstartedwithdrones.comfpv)��
8.3 ��������
�ⲿ��������Ҫ���²��ϣ�
��1Ӣ��˫�潺
������
��12Ӣ���������������
8.3.1 ��1�����̶�����ͷ֧��
��2������������������С��������������һ��С�ĸ���壬��������ڹ̶�С
���˶�����ͷ�����������ֱ�����ϰ�װMobius����ͷ����Ӧ���Դ�һ�����֧��
(��ͼ8-4)�����ǵĵ�һ���ǽ��������ͷ֧�̶ܹ�������ͷ������ϡ���ֻ��Ҫ
���������ԼΪ0.5Ӣ�糤��˫�潺����������ڿ���ĵײ������ڣ��ӽ�����˺
ȥ�����㣬�����֧�̶ܹ��ڸ������(��ͼ8-5)��ͼ8-4 Mobius����ͷ�Ŀ��֧��ͼ8-5 �̶��������֮��Ŀ��֧��
ȷ��ƽֱ!
˫�潺���Ѵ�С�����ϲ���(��������ͷ֧��)��˺�¡�����ʱ�䣬ȷ����
��ͷ֧�ܺܺõض��룬�ڸ�����ϱ���ƽֱ�����û��������һ�㣬��˫�潺˺��
����ճ���Ǻ�ʹ������飬û����ϣ����������ͷ�ڻ���������б��!
8.3.2 ��2�����̶������
���֮ǰ��û�������һ�����������ǽ������̶��ڻ����ϵ�������֧��
�ϵĺ�ʱ������ݵķ�����ʹ��һ�������������߽�����֧��������װ�ף���ͼ8-6��ʾ����4�������ظ���һ���衣����Ե�����ȷ�ķ�����
ȷ�������֧�������ȷ�ķ���֧����3����ߣ���һ�˿����Ա�����ͷ��
�롣ȷ�����Ŷ�ָ���������ǰ����
ͼ8-6 �������̶���������֧����
8.3.3 ��3������������ͷ�ڿ��֧����
���ڣ����ǵ�����ͷ���֧���Ѿ��̶��ڸ�����ϡ��������Ҳ�Ѿ���װ����
������֧���ϡ���ʣ�µľ��ǽ�����ͷ��������ͷ֧��(��ͼ8-7)��ȷ������ͷ
�ľ�ͷָ������ͷ֧���ⲿ��Ȼ������ͷ�в���С���۶�����ͷ֧�ܲ�����
��5��ͻƬ����ЩͻƬ���ڹ̶�������֧���ڵ�����ͷ�����ڣ�����ؽ�����ͷ����
֧�ܣ�ͬʱ��ס֧�ܺ��ṩ�����֧�š�ͼ8-7 ���ڿ������ͷ֧���Աߵ�Mobius����ͷ
��9�� ArduPilot Mega����
���ڣ������Ѿ����ʵ�������Ĵ֣���ʱ�����Mission Planner����ʼ
�����Զ���ʻ���ˡ�һ���������һ���̣�����ֻҪ����һЩ��β��������������
���Է�����!
���µĽṹ������������в�ͬ������ֱ�ӽ����������裬Ȼ���о�Mission
PlannerӦ�ó�������ಿ�֡�
9.1 ��������
�ⲿ��������Ҫ���²��ϣ���һ̨����Windows 7���߸���ϵͳ�ıʼDZ�����(���ֻ��Mac�����Խ���һ
��Boot Camp������װWindows)
�����°汾��Mission PlannerӦ�ó���
��Micro-B��USB 1.12.0����
9.1.1 ��1�������¹̼�
����Ӧ�����ĵ�һ������ȷ���������°汾�Ĺ̼�������ArduPilot
Mega(APM)�����ʱ�䣬�����������ͬ�İ汾����Ҫ���Ž�������ʹ�����
Ʒ�Դ��İ汾����ɸ��£���������ȷ����������ȷ�ĵ�·�ϣ�
a.�����ʼDZ����Ե�Դ��Mission Planner��
b.��USB���²���APM����һ�����ӱʼDZ���
c.����Mission Planner��Initial Setup(��ʼ����)ѡ�����������
���е�Install Firmware(��װ�̼�)��
d.����Ļ�м��ͼ�ΰ�ťѡ��ArduCopter vX.X Quad(����vX.X����İ汾
��)�̼�����(��ͼ9-1)��ͼ9-1 ѡ����Ҫ���µĹ̼�����(���ǵ���������ArduCopter Quad)
e.ϵͳ��Ҫ����ȷ����Ҫ���µĹ̼�������Yes����(��ͼ9-2)��
f.Mission Planner���ҵ����������APM�̼������°汾�����������¡���
��OK����(��ͼ9-3)��
g.�̼����¿�ʼ(��ͼ9-4)��
h.�̼��ϴ�֮����Ҫ���������֤(��ͼ9-5)��
i.�ڸ������֮��Mission Planner�������棬���¿�����ҪһЩ���Ӳ���
(��ͼ9-6)��ͼ9-2 ����YESȷ������Ҫ����ͼ9-3 Mission Planner�Զ��ҵ����APM֧�ֵ����¹̼��汾ͼ9-4 �̼��ϴ���ʼͼ9-5 �̼���֤������ͼ9-6 ���������!����OK����
��������
�ڸ������֮ǰ��Ҫ�Ͽ�USB���¡�ע����������˽��ʱ��ɸ����Ǻ���Ҫ
�ģ����Բ�Ҫ�����һ���̡�
�����ʺ�COM�˿�
ÿ����Mission Planner����APMʱ��������ָ��ͨ�ŵIJ����ʡ���һָ�궨��
������ͨ�ŵ��ٶ�(λ��)��ͨ�õľ��鷨���Ƕ�ͨ��USB���µ�ͨ��ʹ��
115200����ң���̨ͨ��ʹ��57600������Ӧ�ó�����ܻ��Զ����ͨ�����Ͳ���
���������˽���һϸ����Ȼ����Ҫ����ΪMission PlannerҪ��������һ��ֵ��
���⣬�����֪��APM��ʼDZ�����ͨ��ʹ����һ��COM�˿ڡ�Mission Planner
�ܺܺõط������APM��Ĭ��ѡ����ȷ��COM�˿ڣ���������Ҫһ�����š��������
��Mission Planner֮ǰ����APM�������һ����Ȼ��Ч���鿴PC���ã��ҳ�����
���ŵ�COM�˿ڣ���Ӧ���ܿ���APM�ԡ�Arduino Mega���������г����������COM�˿��Ա������
9.1.2 ��2�������Ӳ���ɱ�Ҫ������
���ڣ����Ѿ��ϴ��˹̼��������Ѿ�����һ���ܺõ���㡣������������ɱ�
Ҫ�����ã�ʹ��ֻ��С�����÷������!
ʵ���ϣ������һ�������ַ�ʽ����һ����ʹ����һ����ʹ�õ�Install
Firmware��ť���·���Wizard(��)���ڶ��ַ�ʽ���˹������������ڱ����н�
�����˹��������������ַ�ʽ��������һ���ġ���ǿ�ƽ����в���һ����ɣ���
�˹���������ֻ�����Ҫ���IJ��衣ÿ�������µķ�����ʱ�����Ƕ�Ӧ���������
���裬����δ�������ֻ��Ҫ���²���һ��������(��GPS����IMUУ)���ɣ���
�Ǵ����ͷ��ʼ���⡣
�����κ�����֮ǰ�����Ƕ����뽫APM���ӵ�Mission Planner������Ҫѡ��
COM�˿ںͲ����ʣ�Ȼ��Ӧ�����Ͻǵ�Connect(����)��ť������֮�����
ע������л����һ���µIJ˵�ѡ�����Mandatory Hardware(�ر�Ӳ��)
��Optional Hardware(��ѡӲ��)��
����2.1�����û�������
����Mandatory Hardware�����������Ŀ�е�Frame type��ť����ѡ��X
copter���(��ͼ9-7)��ͼ9-7 ѡ���������
����Ĭ������
�㽫��ע����ڻ���ѡ����Ա���һ������ΪDefault Settings(Ĭ����
��)������ʽ�˵����ڱ��������ڼ���Ժ��Ը���Ŀ������ijЩ�ֳ����˻��Ŀ��
��ʽ�����磬�����ӵ��һ��3D Robotics Iris+����ֱ�������ͻ�������˵��з�
����Ը��ͺŵ����á��ź����ǣ�Mission Plannerû���Դ������ͺŵ��������ã��������DZ����˹����á�û��ϵ�����������ѧ������!
�Ա�X��+
ѡ��X��������ʱ�������ע���һЩѡ��������X��+(����������ʱ
��Ϊ��I��)����ָ���ǻ��������ã��Լ���APM���õĹ�ϵ��������������һ��
�ᴩAPM�����쵽����ǰ����ֱ�ߣ�X����������ֱ��ָ�������綯��֮�䣬��+����
��ֱ��ָ��ijһ���綯����ͼ9-8˵�������������á�ͼ9-8 ���ֲ�ͬ����(X��+)������ֱ����
����2.2��У���ټ�
��һ���Ӳ�����У���ǵļ��ټơ���ΪAPM������һ����������
�⡰�ϡ������¡��ȷ���Mission PlannerҪ���㽫���˻��Ƶ���ͬ��λ�ã�һ
��Ҫ��ˮƽ�Ĺ���ƽ������һ��ɾ��������Ը����������ķ����ھ�����ˮƽ
�������ڽ������������Ҫ�������������������ʹ������ˮƽ��ȷ��ѡ��
�������Ƿ�ˮƽ�����dz���ʹ��С�ĵ��ӹ���Ϊ���ƫ��ˮƽ��������ʹ�õ�Ƭ
������
�������˵��е�Accel Calibration(���ټ�У)��ť(��ͼ9-9)����
������Ӧ�ô����з���һ�����ΪCalibrate Accel�İ�ť�������ð�ť������
Mission Planner��ָ�����Ҫ���㽫���˻����ڶ����ͬλ�ã�Ȼ��������
��������һ���˹�����ɣ��㽫����Уͨ����ʧ�ܵ�֪ͨ��Ҫ����ʹ�õ�λ��
�ǣ�ͼ9-9 У���ټ�
ˮƽ
��������������ʱ���ֵ�����λ�á�
����
�������������ɻ�������λ�õ��š�
��ͷ����
��������ǰ��ֱָ���棬β�����ϡ�
��ͷ����
��β���£���ͷ���ϡ�
�������������£��Ҳ����ϡ�
��
�������Ҳ����£�������ϡ�
����2.3����������
�������˵��е�Compass(����)��ť��������Ӧ�ô�������ʾ����������
Ļ(��ͼ9-10)�����������Ƿdz���Ҫ�Ĺ��̣�����3���������裺
ͼ9-10 ��������
a.�����Զ���ƫ�ǣ��ҵ���ѡ����Ӧ�ô��ڵ�Enable(����)��Auto Dec
Declination(�Զ���ƫ��)��ѡ�������������APMʹ���Լ���GPS�ҵ�������
��λ�ã�Ȼ��Ը�λ����������̡������ÿ����������͵شű���֮���ƫ�
b.ѡ���������ͺͷ�������Ӧ�ô��ڵ�Orientation(����)����ѡ��APM
with External Compass(���ⲿ���̵�APM)ѡ��⽫�Ѹ��ֶεײ����ı���
ΪROTATION_ROLL_180������Ϣ������APM����ָ��ķ���Ҳ��������˿�ʼ�����Ļ���
c.ִ��У�����ڣ������Ѿ�ȷ�������̵ķ����Զ������У��(��ͼ
9-11)��������Ӧ�ô��ڵײ���Live Calibration(ʵʱУ)��ť������
Mission Planner��ָ����С���һ��������Ҫ���Ѽ����ӣ�Ӧ�ó���Ҫ��������
������ת����������ʹ�������һ�����������л�ȡһЩ�����㡣��һ��ʱ�䲢��
��ָ����У�ֱ��Mission Planner֪ͨУͨ���������ΪijЩ��ֵ�ԭ��У
ʧ�ܣ���Ҫ���ġ�ֻ��Ҫ�ٴν���У��ȷ���������̵��������ƶ����ɡ�
ͼ9-11 ����У
����2.4����̨У
�������ǵ�̨У��APM�Ʒ����Ϊ��̨�����Դ����ڿ�ʼ���ǽ����������ﻥ
��ʹ�á��������˵��е�Radio Calibration(��̨У)��ť(��ͼ9-12)��
�⽫����Ӧ�ô�������ʾУҳ�档��������˼·����Mission Planner����
�ĵ�̨ͨ�ţ��ҳ�ÿ��ͨ���ķ�Χ����У�ڼ䣬ϵͳ��Ҫ���㽫���ݸˡ����غ�
��ťת����С��������ã��Ա�Ӧ�ó����˽�ÿ��ͨ���ķ�Χ��һ������ɫ������
ͼ����ʾ��̨��ÿ��ͨ�������ǽ����ŵ�̨�Ŀ��ƶ��ƶ�(��ͼ9-13)��a.�������Դ(����㻹û����ô���Ļ�)��
b.������Ӧ�ô�����Radio 8����ͼ����ɫ��Calibrate Radio(У��̨)
��ť��
c.����ָ����е�̨�����豸����������С���ã������㽫Ҫʹ�õ�����
�����豸���緢����ϵIJ��ݸˡ����ء���ť�ͻ���(������ӵ�еĵ�̨����)��
�㽫ע���ÿ��ͨ��������ͼ�Ͻ�����һ��ϸ���ߣ���ʾ����С�C������á�
d.���֮����Click when Done(���ʱ����)��ť(��У������ͬһ
����ť��ֻ�DZ�ǩ��ͬ)��
ͼ9-12 ��̨У��ʼ֮ǰ
���У֮����ʾһ��С�ĵ������ڣ��������̨ÿ��ͨ������С�C���ֵ
(��ͼ9-14)������OK�뿪����Ļ��������һ����ͼ9-13 ע���ʾÿ��ͨ����С�C���ֵ�ĺ�ɫ��
ͼ9-14 ף����!��̨�Ѿ�У����2.5�����÷���ģʽ
���Ѿ�У�˵�̨�������������ڷ���ģʽ������������ȷ�ķ���ģʽ��Ҫ��
��������̣����ȵ������˵��е�Flight Modes(����ģʽ)��ť���⽫����Ӧ
�ô�����ʾ����ģʽ��ָ����ͼ�����ǽ�ʹ�������ͼ������ͣ���ȶ�����ģʽ��
�����ĵ�̨��һ����λ����(�е�ֻ������λ��)������ѡ��һ������ķ���ģ
ʽ����Auto(·������)����RTH(����)��
a.�ڿ�����̨��Դ������£��л�����ģʽ���صIJ�ͬλ�ã�ͬʱ�۲�
Mission Planner���㽫ע������ص�ÿ��λ�ý���ʹӦ�ó����в�ͬ�ķ���ģ
ʽ�˵������ɫ������ÿ������λ�á���������ģʽ�˵���
b.ʹ��ÿ������ģʽ�������˵���ָ��ϣ���øÿ���λ�ÿ�����ģʽ�����磬�������λ��1������Ӧ�ó����е�ģʽ�˵�2��������������˵��и��ģ�����ͣ
����ģʽָ�����ÿ���λ��(��ͼ9-15)�����ڣ��л�������λ��2����ģʽ�˵�ָ
���ȶ�ģʽ(��ͼ9-16��ͼ9-17)��
ͼ9-15 ����λ��1��������ģʽ�˵�2ͼ9-16 ����λ��2��������ģʽ�˵�4ͼ9-17 ʹ�������˵����ȶ�����ģʽָ����ģʽ�˵�2
����2.6�����ù��ϰ�ȫ
���ǵı�Ҫ���ÿ�Ҫ����ˡ����һ�����ǹ��ϰ�ȫ���á��������ʹ������
�������ڷ�������ij������ʧЧʱ��ȡ�Ĵ�ʩ�����統ʧȥ���ߵ����ӻ��ߵ�ص�
���ڷ���ʱ�½���ijһˮƽʱ��ȡ�Ĵ�ʩ��Ҫ��ʼ��һ���裬���������˵��е�
��FailSafe(���ϰ�ȫ)��ť��
a.�ҵ���Ӧ�ò˵��Ҳ��Battery(���)��Low Battery(��ص͵�
ѹ)����Ϊ10.4��Reserved MAH����Ϊ0����ʹ����ֻ��ص�ѹ�������ü��ӵ��
��������ֻ�����κ�ʱ��ʹ����ͬ��С�ĵ�أ���ȷ��֪���������ϰ�ȫ��ʩ
֮ǰ��Ҫ���١�ʣ��������ʱ���Ż�����MAH����ʹ�ó���һ�ֵ�ش�Сʱ�������
ѡ����ܻᵼ�¹��紥�����ϰ�ȫ��
b.���ڣ�������Ҫ���÷�����ع��ϰ�ȫ�¼�ʱ��ȡ�Ĵ�ʩ����ͬһ��
Battery�ֶε������˵���ѡ������һ��(��ͼ9-18)��
�����˵��е�ѡ���У�
��Disabled(����)
��Land(��½)
��RTH(����)ͼ9-18 ��ع��ϰ�ȫѡ��
c.���·���Radio(��̨)���У��������˵���ѡ������IJ���(��ͼ9-
19)���⽫����APM�������ߵ���ϵ�ж�һ��ʱ��(��APM����)ʱӦ�ò�ȡʲô��
ʩ�����ڣ���FS PWM�ı�������е�ֵ����Ϊ975���⽫����APM��RTH�¼��ڼ��
PWMֵ����̨���ϰ�ȫ��ʩΪ��
��Disabled(����)
��Enabled always RTH(���ã����Ƿ���)
��Enabled Continue with Mission in Auto Mode(���ã������Զ�ģʽ�е�
����)
��Enabled always Land(���ã�������½)ͼ9-19 ��̨���ϰ�ȫѡ��
9.1.3 ��3�������ӿ�ѡӲ��
���Ѿ�����˱�ҪӲ��������!������ʱ��ת���ѡӲ���ˡ�APM�������Զ���
ʻ�������������ѡӲ�������Ǹ�ϵͳ�����ڶ�ҵ�������ߺͷ����ѵ���������֮
һ�����������Ӳ����ң���̨�͵�ؼ���ǣ���������ѡ��Ҳ�ܶ࣬��������
�����������ټ����ǡ���ѧ������������Ļ��ʾ��(OSD)���������̨(�����ŷ�
����)�����߸�����������ģ�顣��Щ����Ӳ���дֳ����˱���ķ�Χ��ʵ��
�ϣ�������Щѡ��Ϳ��Զ�������!��������ⲽ���У����ǽ��������������е�
ѡ��ң���̨�͵�ؼ����ǡ������ѡ��װ��Щ�����������������3��
����3.1��3DR��̨(ң��)
�ڵ�7���У�����ΪAPM��װ��ң���̨����Щ��̨�dzɶԳ����ģ�����гΪͬ
һƵ��(���Net ID)�������ϣ����˽�ͨ��Щ��̨�ĵ�Դ���������Ӱ�ť֮�⣬�㲻��Ҫ���κ����顣���ǣ�֪����̨����������ڱ�Ҫʱ��θ��ģ��Ǻܺõ�
����(��ͼ9-20)�����������һ��ŷ�ֱ�����������Լ���Net ID�Ա�������ţ�Ҳ��һ�������⡣
ͼ9-20 ����ң���̨����
�������²��裬����̨�ͨ���Ƿ����Ԥ�ڣ�
a.ȷ���Ƿ��Ѿ�ͨ��USB���ӵ�Mission Planner������Ѿ����ӣ��Ͽ�����
�����¡�
b.��ͨ������Ͱ�װң���̨�����˻��ĵ�Դ��
c.������ң���̨���ӵ��ʼDZ�����Mission Planner��
d.�ڱ�Ҫʱ����COM�˿ڣ�������������Ϊ57600��Ȼ��Connect��
�����������Net ID���ã��Ա��ں�������һ�����ʱ����ɸ��ţ�ֻ��Ҫ
ʹ�������˵��ҵ�һ���µ�Ƶ����һ��Ҫ������(Local������)��Զ��
(Remote������)��̨����Ϊͬһ��ID��Ȼ����Ӧ�ô��ڶ�������ɫSave
Settings(��������)��ť������3.2����ؼ����
������ϲ������һ����ѡӲ���ǵ�ؼ���ǡ�����һ�ּ��豸�����ǿ���
�ṩ�dz��м�ֵ����Ϣ�������ڵ�ع��ϵ�ʱ��������ķ������������5��������
�ܵģ���ؼ���ǰ�װ�����������͵��֮�䡣��ʹ��һ��СоƬ��APMͨ�ţ���
����صĵ�����ʣ��������Mission Planner�����ҳ�����������������ؼ��
�ǵ����á�ѡ�����˵��е�Battery Monitor(��ؼ����)�����Դ������
Ļ������Կ���3�����ã�
�����
������ؼ���ǽ���ص����ݡ�ѡ����Disabled(����)��Battery
Volts(��ص�ѹ)��Voltage and Current(��ѹ������)�����ǽ�����ӵ�е�
�ؼ����ʱʹ��Voltage and Currentѡ��(��ͼ9-21)����ѡ���ܹ��ṩ������
Ϣ�������Ǽ��ܺõ����顣
������
����˵�����ѡ��ʹ�õ�ؼ���ǵĴ��������͡�������Ǵ�Maker Shed����
������Ӧ��ʹ��3DR Power Moduleѡ�������������ط�����ļ���ǣ�����
��ѯ�̵꣬ȷ������������ļ�������ͣ�Ȼ����б���ѡ�������֪��������
û�а취ȷ����ʹ��Other(����)ѡ��ͨ����Ч��
APM�汾
���ѡ�����������������������ֱ������ѡ��APM 2.5+3DR Power
Moduleѡ����������Dz�ͬ�汾��APM(��Pixhawk����PX4)����ѡ�����ҵ�
��ѡ��ͼ9-21 ��ؼ��������ҳ��
9.2 ̽��Mission Planner�������
�ɵú�!���Ѿ�������䱸APM��������ֱ������������!�������ǻ���������
�۲�һ��Mission PlannerӦ�õ�����ܡ���ĿǰΪֹ������ʹ�õĹ��ܶ���
Initial Setupѡ��С����ڣ����ǽ��о�����ѡ��е�һЩ���ܡ���Щ����
�������Ѿ����۹��Ĺ������ƣ����Ǵֶ����¹��ܡ�����������
ConfigTuning(���õ���)��ť��̽�����������˵��е�һЩѡ�
9.2.1 ����ģʽ
�����Ļ(��ͼ9-22)ʵ���Ϻͱ���ǰ�����۵�Flight Modes��Ļ��ȫ��ͬ��
�����ʹ�����ҳ��Ϊ���ߵ緢����ϵIJ�ͬ����λ��ָ����ͬ�ķ���ģʽ��ͼ9-22 ����ģʽ��Ļ
9.2.2 ������
�����·���Ա��˵������Χ��(Geo Fence)�����Ǻ�����İ�ȫ���ܡ�����
������������������ɵ㸽������һ�������Χ������������������Խ�÷�Χ����
�Խ�����Ϊ��һ������ǣ������������ֱ�����ķ���!APM��ʹ�ó�ʼ���λ��ָ��
�����㣬�ɴ˿�ʼ��������Ļ��ѡ���ѡ��涨�������ķ��о��룬�Լ���Χ
������ͻ��ʱ����������������Ҫʹ����һ���ܣ�ֻ���ѡ����Ӧ�ô��ڶ�
����Enable��ѡ��Ȼ�����������ò���(��ͼ9-23)����ס������IJ���ʹ�ù�
�Ƶ�λ���������е����ֱ�ʾ�ף�������Ӣ�ߡ�ͼ9-23 Geo Fence��Ļ
9.2.3 ��������
��������������Ķ��������˻������£��Ϳ�����˵��������ij�ַ�ʽ������
����ֱ�����������˼·�ǣ���ͬ�����˻��в�ͬ�ķ������ԣ��Զ���ʻ��(����
�ǵ�ʾ������APM)���������ƥ����Щ���ԡ��������ǵġ�С������������������
�Բ�ͬ��һ��35���ء��¹ҵ�������İ���ֱ����������ʹ������������ַ�����
��ʹ����ͬ���Զ���ʻ�ǣ����Ҷ�����и������Ա����κ�һ�ֻ����й�����
����������APM��������ڵ�(��ͼ9-24)����������ʹ��APMƽ̨������֮һ
�ǣ����м������IJ�����������������������(�ֹ��ܳ����˱���ķ�
Χ)�����ҳ���������һЩ�ı����������֪���Ĺ��ܡ�����Ե������˻��Է�
����������Ӧ�����˻����Զ���ƽ���ܵ����жȡ�������ͣλ���Լ����������
�����������ʵ�Ӱ�졣ÿ�����붼��һ����������˵���˸û���λ�öԷ�����
��Ӱ�졣�������ң���̨���������ڷ����������ڼ��Mission Planner��
����Щ������ʵʱ�۲���Ч����ͼ9-24 ������������
9.2.4 ��չ����
��չ������Ļ���������������ķ������Ե���(��ͼ9-25)����չ������
ʱ�����PID(���������֡���)����������Ļ���Ե�����������3���˶�(��
����������ƫ��)�������������һ��PID�������㷨�����ֿ������ڴ��ģ��ҵ��
��ϵͳ�зdz����С���һ����ͨ������һ�����ƻ�·�������������ֵ����ͼУ��
���õ�Ԥ�ڵĽ����
���˵��ǣ�APM���ֳɵı����ã����ڴְ�װ��˵�������úܺá������
�������ֵò���Ԥ�ڣ��������Ҫ����PID�Եõ���õ����ܣ����ǽ������һ����
���е������о���PID�����ܸ��ӣ������˱���ķ�Χ������һЩѡ������Զ�����
APM��PID���ã��������Ƿ�����һ���̵Ľ���û��ΰ롣��ʹ�������˵��һ��ѡ
�������ѧϰPID�����������Ա������̨�����������Ҳ��ʧΪһ�������⡣
�������ⷽ�����Ȥ�����ǵ���վ���ṩ��һ���ܺõij�����
(http:gettingstartedwithdrones.compid-tuning)��ͼ9-25 ��չ������Ļ
9.2.5 ������
������ҳ��չʾ��APMƽ̨������������(��ͼ9-26)������Ļ��ʾ�ܳ�
�IJ����б����������������ڶ��ƻ����������������������������б�̫
�������ڴ�һһ���ۣ����ǵ�Ȼϣ�����ܹ��Լ�����̽�������ǣ�һ��Ҫע�⣺
�ı���Щ����ʱҪС��!�����������������ã��ڸ��ĺ��Է�֮ǰ����APM��վ��
��Ardupilot��վ�Ͽ����ұ��������������б�
(http:ardupilot.orgcopterdocsparameters.html)��ͼ9-26 ������
9.2.6 ��������
��ĿǰΪֹ�����黨�����൱��ƪ������ͨ��ң���̨��ң�����ݷ��͵�����
վ�ķ���������������Ļ(��ͼ9-27)���Dz鿴���������ݵĵط��������
Flight Data(��������)ѡ�ʱ���ͻ�ע���Ļ�Ҳ���һ���ܴ�ĵ�ͼ��ͼ
�Ͻ�ʵʱ���·��������ڵ�λ��(ֻҪ�㰲װ��GPS)��ͼ9-27 ����������Ļ
Ӧ�ó�����ཫ��һ����Ϊ���������ֵ���Ŀ���ϰ벿�ְ���һ������ܺ���
Ϥ���DZ�������������һ����ȫ�ߴ�ɻ����ܹ������ĵ�ƽ�ǡ�Ψһ�IJ�ͬ�ǣ���
�ǵĵ�ƽ������һЩ�����������ֱ����صĸ������ݡ�����DZ���ͨ�����ŷ���
���ķ����ƶ���ƽ��(����ɫ����ɫ����ָ�)����ʾ��߶ȣ�������ʾ��������
������ģʽ��GPS״̬�����ˮƽ�����̷���
��ƽ��֮�µĿռ�������ʾһЩ��APM���ص���վ�����ݵ㡣��Щ���ݵ��ڷ���
�зdz����ã����ǽ�������ȷ���������ķ����ٶȡ�������ɵ��λ�ú͵�ǰ�߶�
�ȡ�
9.2.7 ���мƻ�
������ǽ����˽�һ�·��мƻ���Ļ��������������Ļ�滮��������
(��ͼ9-28)��է��֮�£����ͷ���������Ļ�dz����ƣ���Ϊ��Ҳ����ͬ�ĵ�ͼ�����������ͼ����������ӹ��ܡ�ͼ9-28 ���мƻ���Ļ
������������·���㣬һ�ж������������Ļ�Ͻ��й滮������������
����Σ����Ƕ���һ���������������ض�γ�ȡ����Ⱥ߶ȵ�·������ɡ��㻹��
���߷����������ÿ��·��ʱӦ�ý��еIJ����������磬�����ϣ������ͣ30s������ֱ��ת����һ��·���㣬�Լ��ڵ���·����;��Ӧ�ÿ��Ƶķ����ٶȡ�
�ڽ����κ���������֮ǰ����ʵ�������˹������Ƿdz���Ҫ�ġ�ÿ������Ա��
Ӧ���ܹ���GPS���ߴ�����ʧЧʱ�˹����Ʒ�����������
ƽ�����������������
��ȻMission Planner��һ����ȫ��Ӧ�ó������Թ滮��ִ���������мƻ����������ֳ�ʹ�����������Ǽ��������飬��Ϊ�������ڱʼDZ����ԡ�������ϲ��
ʹ�ý�С�İ�ƽ����ԣ����ٷ���ʱ��ҪЯ�����豸������ƽ�������������ֱ
�Ӱ�װ��2.4 GHz���ߵ緢����ϣ������п���ϵͳ������һ�����������ֳ�����
���õ�ƽ����Ը���Ȥ����������3DR��װӦ��Tower��������ʷ�ƾõ�Droid
PlannerӦ�õ����°汾���������Ҫ�˽�������ƽ����Ե���վ��֪ʶ�����Է������ǵ���վ(http:gettingstartedwithdrones.comground-stations)��
9.3 ������
�Ӽ�����˵���������Ѿ��������������������������Ѿ���װ�����п�����
������ϣ��㼸�������������Զ�����в��ԣ��������ܲ��ܺܺõط���!��
�ǣ��������������ṩһЩ���顣������ң�ط��к�İ�������ǽ��������Ķ�ʣ
�µ��½ڣ����õ����������ȫ�ķ�ʽ���С��������Щ�½ڵ��Ķ�֮�����
�Լ������²��裺
1.ֹͣ������ת�����ٴμ�����е綯������ת�����Ƿ���ȷ������ܻ��ǵ�
�ڱ���ǰ����½��У����Ǵ�ESC�н�������ͷ����綯��ʱ�в�֪����ȷ�ķ���
�������Ǹ��˵�ʱ����������ĵ綯��(Ĭ�ϲ���������ݸ����²��������
3s)��һ�μ��һ���綯�������������ת��������������������ͷ�е�����
������ʹ�䷴����ת��
2.���������رա��綯����ȷ��ת������£����APM�Ƿ���ȷ���Զ���ƽ����
����ͨ����������ת�綯����ͬʱ�ֳ�����ֱ��������ij������������б��ȷ����
���APM�Ĺ�������Ԥ�ڣ���Ӧ���Զ�����綯��(����������)ת�١�������ֲ�
��ȷ����������ESC�Ƿ���APM�϶�Ӧ��������ӡ�
3.�����ĿǰΪֹһ����������ô����װ�����������������!��Ҫ�ż�����
������ɡ��������ת�������������ܷ�������ֱ�����뿪���档��ʱע����ݸ�
�Ŀ���Ҫ��͡�ȷ��һ��������������ָ��ȷʵʹ������������С����һ��
����ȥ�������������Ӵ����ţ�ֱ�����1��2Ӣ�ߡ���Ҫ̫�������棬�������Ч
Ӧ���ܻ�����鷳������ЧӦ�������������ſ��Ŀ��������Ӵ���ʱ��������
�ɵ��Ŷ����ܽ��������������ܡ�
4.����ʵ��!�ⲻ��һ���������������ղ�����õ����������ڻ���ʱ�����
��ķ��������Ժ�������ȡ�óɹ���
��10�� ��ȫ�������εķ���10.1 ��ȫ��һ
�������ճ������о�����������ȫ��һ����仰�����ɺܳ�֣������ܱ�����
�������˵İ�ȫ������κ��豸���������ɶ�����Ҫ���ֹ�����С��UAV����ȫ�������εط��У���ȷ���㳤ʱ��زμ���������������ͷ���С��UAV��������
����������Դ���ȫ����Ҫ�ԡ����ǶԷ�����ģ�ͺ�����UAV���������ס���
�DZ����еĸ��������л����˻��ѧϰ������ǿ�����Եļ���;���������
ȫ��ȫ������һ�п�����ɲ����ɹ�����ȫ������������
10.2 ��ѵ�ͽ���
Ҫ��̽������ֱ������ͬʱ���ְ�ȫ���ܴ��һ���ֹ����Ǿ����ܵ�ѧϰ����
�ļ�����DZ�ڷ��ա�С��UAV�������ƺͰ�ȫ�Լ�������ȡ���µĽ�չ��������Щ��
չ�ܹ���֤���а�ȫ�����ǣ����Dz����������Զ����п���ģʽ��GPS�������ȶ�ģ
ʽ����������ԣ����Ƕ����κ��豸�����ͺͽ�������ʱ�������εIJ�����Ӧ֪
����νӹܷ��������˹����Ʒ��С�û��ʲô�ܹ�������Լ���֪ʶ�����鷽���
���ۣ��Լ������ݸ��ϡ���ʵ����
>ʹ�÷���ģ�����������γɼ������ͱ��ܵķ��п���������
10.3 ��Դ
��������ȫ�������εطŷ�UAV�����ְ�𣬵����㲢���µ��������Է�����
����ơ��������߷������κβ�ȷ���ĵط���������Ѱ�������������ɹ�С��UAV
������ʹ�õ���Դ��������̳�����������Եõ�����UAV��ȫ�Ժͼ����Ľ��鼰
��Ϣ��
2014����ף���3����֯����������վ�(FAA)���ܺ�������С��UAV��ȫ
���е�����˵�������ʵ������˹�ʶ����3����֯�ǹ������˻�ϵͳѧ��
(AUVSI)������ģ��ѧ��(AMA)��С�����˼�ʻ���������ϻ�(SUAVC)������
����һ�ݼ�ʻС��UAV������Ϊ�����й������ǽ���İ�ȫָ��������һ
���ܺõ���㣬�������ǽ�������������ڵز鿴��Щ������Ϊ�����Dz��Ϸ�չ
�ġ�������������б��ж�������˷����ܽᣬ����һЩרҵ�������ε�С��UAV���л��˼·��ӽ��ܡ�
10.4 ��Ҫ����
��ҪSUAS��Դ�����Ҫ���Ӱ�����
��AUVSI(http:www.auvsi.orghome)
��AMA(http:www.modelaircraft.org)
��SUAVC(http:www.smalluavcoalition.org)
��FAA(http:www.faa.govuasgetting_startedfly_for_fun)
���⣬�����Բ������ǵİ�ȫ�Թ�������б�
(http:gettingstartedwithdrones.comdocsUAVSafety.pdf)��
AMAҲ��һ������RC�������������ʵ���ĵ�ҳPDF�ļ�
(https:www.modelaircraft.orgfiles105.pdf)��
10.5 �ؼ����а�ȫ����
������ʱ����ȫ�����εķ���Ӧ��ʼ���������Ҫ���������Ϥ������
����ܹ��ܺõ�����Χ�����ǹ������죺
��ʼ����400Ӣ�����µĸ߶ȷ��С�ȫ�ߴ��������500Ӣ�����ϵĸ߶ȷ��С�
�������ܹ������˼�ʻ�����������˼�ʻ������֮������100Ӣ�ߵĻ�������
�����������(LOS)֮�ڷ��С�����ζ�ţ����ڲ���ʱʼ���ܹ�������ķ���
�����������ǵľ��飬����̫����ͬ�ķ����Ϲ۲�ɻ����ܲ����ܼ������⡣��ϸ
���Ƿ���ʱ��������ķ���ɫ������ܻ���LED��������ʶ������������ǰ��
�ͺ�ˣ��Ӷ����ַ���С�ʹ��FPV��Ƶ�۾���ȫ���е�˵����μ����ں���IJ�
�֡�
�����뵱�ص�UAV����ģ�ͷ����������߾��ֲ����������ĵ��������������Դ����Լ���MeetUpȺ�����۹���UAV��ȫ�������η��е����ʵ���ķ�չ��
������Ҫ���κλ�����5Ӣ�ﷶΧ�ڷ��У���Ҫ�ڻǰ��һСʱ���ڴ�������
�ݵ�3Ӣ���ڷ��У�Ҳ��Ҫ�ڹ��ҹ����߾��»��ط��С�
https:www.mapbox.comdroneno-fly�ϵĽ���ʽ��ͼ��������ʶ���������
���μӷ��пγ̡��⽫�����ڰ��㸴ϰ����ԭ��������ȫ�ߴ�ɻ�����Ա����
��������С��㻹����Ѱ�ҹ���С�����˷��������ݵĵ��ؿγ̡�
����ÿ�η���֮ǰ��һ��Ҫ�������豸��ȷ�����������������������״
̬��
������ֻ��Ϊ����Dz!��Ҫ��δ��FAA��Ȩ������½�����ҵĿ�ĵķ��С���Ӧ
���ڻ��۶��꾭����ٿ������ַ��С��������ı��ն�������ʹ�ò��DZ��裬����
����һ�ݱ����Ǹ������⡣�������AMA���о��ֲ�����Ա�ʸ��оͰ��������ı�
�ա���ҵʹ�ñ��蹺���ա�
��������³ç�ط��С��ⲻ����Σ�գ����Ҷ������ڵ��������ǺͲƲ����Dz�
���صģ�����ܻ�����յ���Ʊ�߶����һ��Ҫע�ⰲȫ��
10.6 ��һ�˳��ӽ�
������������������ϲ������Ƶ�۾����е�һ�˳��ӽ�(First-Person
View��FPV)���У���Ƶ�۾��ܸ�����Ա�������ڼ�ʻ���еĸо���UAV��ǰ�˰�װ
һ��С������ͷ���ṩ���˻��ӽǵ�ʵʱ��ͼ��FPV���еĿ������й鹦������֯��
С�����˻�������2015�������·ݵġ�Make����־���������ɫ��FPV���Ժ���
Ϣ��������һЩ��ʾ��
����һλ�������У���Ϊ�۲�Ա������Ҫ������Ϊ���ڶ�˫�ۡ�������ֱ����
������֮�ڣ��Կ��ܸ��ŷ���·�����κ�������Ծ��档
������������FPV����Ա��ͨ���ʹ�õ���Ƶͨ��(Ƶ��)��������պ��ܼ�
�ȵĸ��š�
��ǰ��Զ����Ⱥ�����ݡ���·�͵�����·�Ŀտ���ƫԶ����������������ӻ�������FPV����������Ϊ���ǿ��ܻ֪�����ؽ��� ......
�����ڲ鿴��ժҪ����ҳ�� ���PDF����(14584KB��188ҳ)��